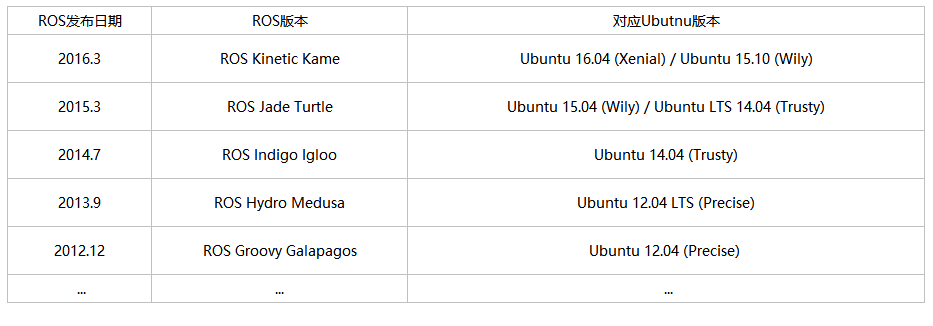
ubuntu与ros对应版本关系(我目前更多的用的是ubuntu16)
ubuntu16下ros安装步骤
1 | $ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
安装完成后,在终端输入roscore,若最后出现roscore,则说明安装成功
原文:ros官网
总结:上面安装步骤安装的是ros kinetic 桌面完全版,并且安装完后,默认安装了gazebo7。但在终端输入gazebo,并不会出现gazebo界面,原因是缺少gazebo的两个最基本模型文件(sun和ground_plane)。gazebo_models文件下载,点击此处。