前言
记录的是研究生阶段以来使用gazebo过程中遇到过的一些坑,以及一些相关的gazebo配置
1、gazebo模型文件说明
如果不是安装的gazebo8,如默认安装的ros kinetic版本对应的gazebo7和ros indigo版本对应的gazebo2的话,在终端输入gazebo的时候,会卡着,gazebo界面出不来。其原因是因为没有下载gazebo的模型,下载完后将模型拷贝到~/.gazebo/models/文件夹即可。
值得注意的是:~/.gazebo/models/文件夹下只需要有sun模型文件和ground_plane模型文件就能正常打开gazebo界面
2、gazebo_model_path配置
针对以往的总是要将gazebo model文件放在~/.gazebo/models文件,而不能存放在自己下载的ros程序包下的model文件夹下,主要是因为环境变量没有配置,配置好后就可以将所有的模型文件放在自己想放的位置。
(1)首先在~/.bashrc最后一行添加gazebo_model_path路径
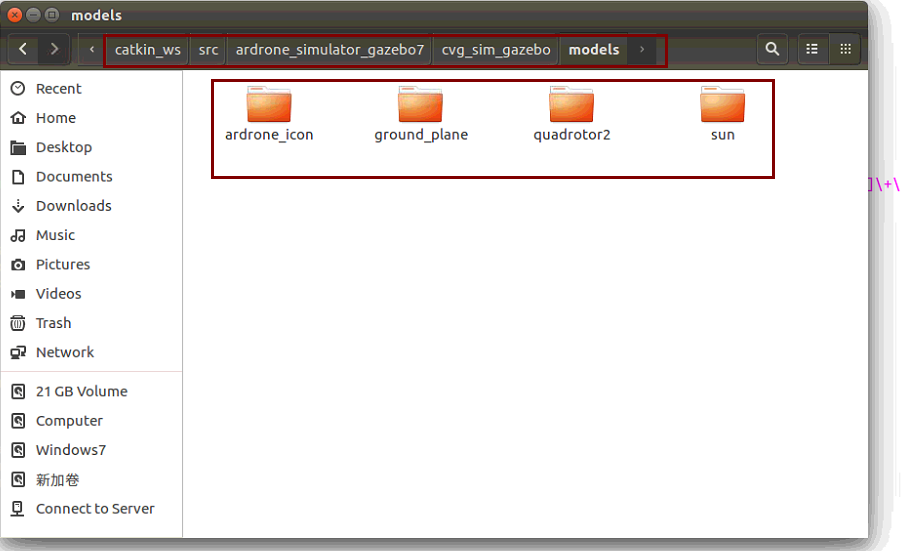
1 | export GAZEBO_MODEL_PATH="/home/cugrobot/catkin_ws/src/ardrone_simulator_gazebo7/cvg_sim_gazebo/models" |

其对应的模型文件夹如下:
(2)然后,在launch启动文件夹下,添加env代码,如下
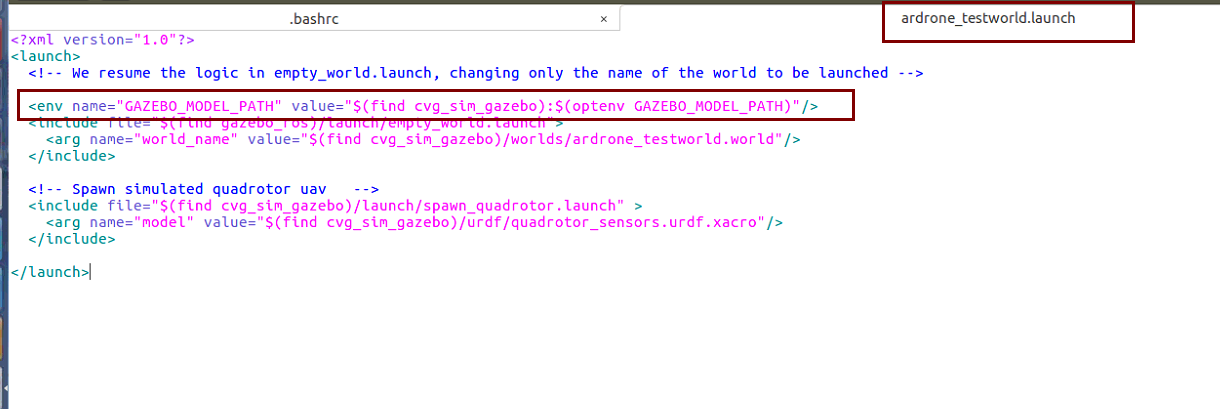
通过env | grep GAZEBO_MODEL_PATH命令可以查看其配置路径,同理可以应用于其他路径查看
3、gazebo关闭client界面
在做强化学习训练时,打开gazebo界面可能会使训练比较耗时,因此关闭client界面也许是一种比较好的方法。
gazebo平台第三视角关闭方法如下:
1 | $ roscd gazebo_ros |
在打开的界面中修改两处地方,第一处在第7行,将
若上面方法还不能关闭界面,在launch启动文件里面,找到所有相关联的启动文件,将上面的修改方法在launch里面也执行一遍。
4、gazebo仿真世界中模型位置修改
4.1 通过os.system()函数实现rosservice服务
我们能在终端通过调用 /gazebo/set_model_state服务来重置pose和twist,这是最初始的时候的方法,但在测试过程中,重置位置容易出现在限定范围外,因此不好,关于修改模型位置方法可以参考
4.2节
1 | rosservice call /gazebo/set_model_state '{model_state: { model_name: quadrotor, pose: { position: { x: 5, y: 0 ,z: 1 }, orientation: {x: 0, y: 0.491983115673, z: 0, w: 0.870604813099 } }, twist: { linear: {x: 0.0 , y: 0 ,z: 0 } , angular: { x: 0.0 , y: 0 , z: 0.0 } } , reference_frame: world } }' |
其中,需要说明的是quadrotor是你要修改的模型名称
参考网址:http://wiki.ros.org/simulator_gazebo/Tutorials/Gazebo_ROS_API
如果要在python程序中调用上面的重置命令,则需要使用os.system()函数来实现
1 | os.system('''rosservice call /gazebo/set_model_state "[quadrotor, [[5, 0, 0], [0.0, 0.0, 0.0, 0.0]], [[0.0, 0.0, 0.0], [0.0, 0.0, 0.0]], '']"''' |
如果写成动态加载代码的话,可以如下图所示:
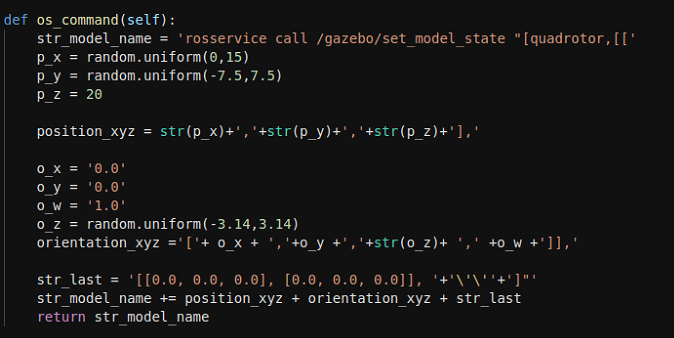
参考网址:https://blog.csdn.net/lordofrobots/article/details/78088517?utm_source=debugrun&utm_medium=referral
4.2 rospy.ServiceProxy()函数实现位置修改和获取模型位置
重置模型坐标位置主要是调用
/gazebo/set_model_state服务,而获取模型坐标位置是调用/gazebo/get_model_state服务
其中,如/gazebo/set_model_state的type类型可以通过rosservice info /gazebo/set_model_state命令来确定
具体代码如下:
1 | #!/usr/bin/env python |
该代码转载于此处
5、gazebo仿真时间加速
主要遇到的问题是在进行DQN训练时,由于机器性能及每步飞行时间等原因,训练时长较久,因此能够在仿真中修改一些配置,使得仿真的时间比现实时间更快。
主要是通过修改world文件里面的一些物理属性,来实现仿真时间加速的效果,若需要加速时,还是在重新测试比较好,我修改为如下代码后,较之前能有3倍左右的提升速度,并且没有使用rospy.sleep(2)函数,而是使用的rospy.Rate(0.46).sleep()来代替。
1 | <physics name='default_physics' default='0' type='ode'> |
通过修改max_step_size的值能对gazebo进行加速,一般修改的时候real_time_update_rate设置为0。
Max_step_size:0.001(默认值)
Real_time_update_rate:1(默认值)
Real_time_update_rate:1000(默认值)
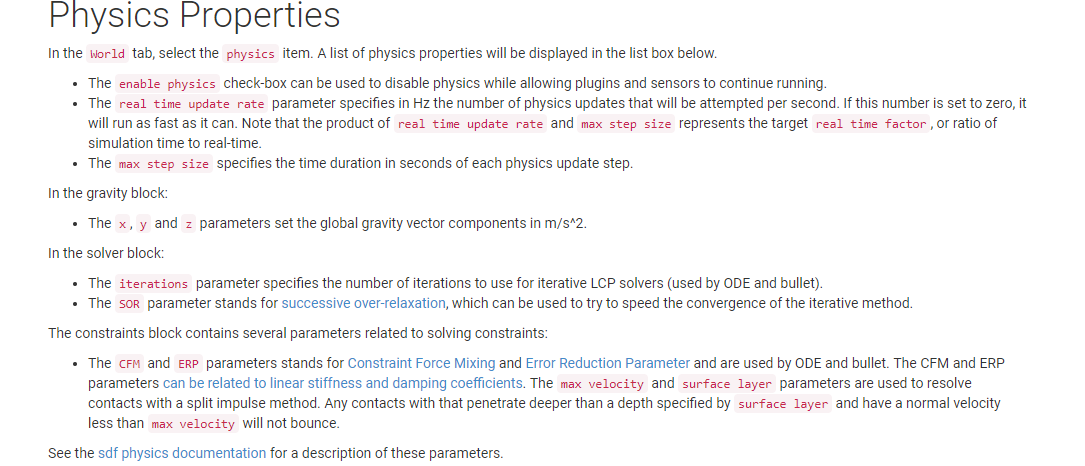
参考网址:http://gazebosim.org/tutorials?tut=modifying_world&cat=build_world
6、gazebo添加定制模型
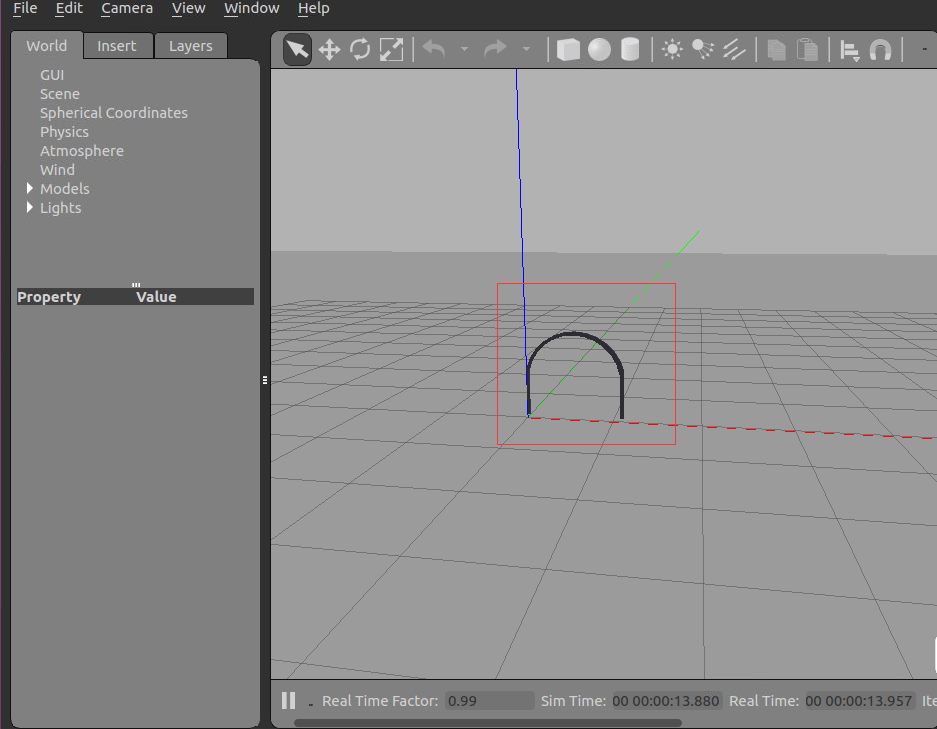
以前都是自己制作的一些简单模型导入到gazebo仿真世界中,但想加载一些特定的模型时,不一定能自己制作出来,这时可以下载3D Warehouse网站上做好的模型,导入到gazebo仿真直接中即可
例如,这样的模型则不一定能自己制作出来
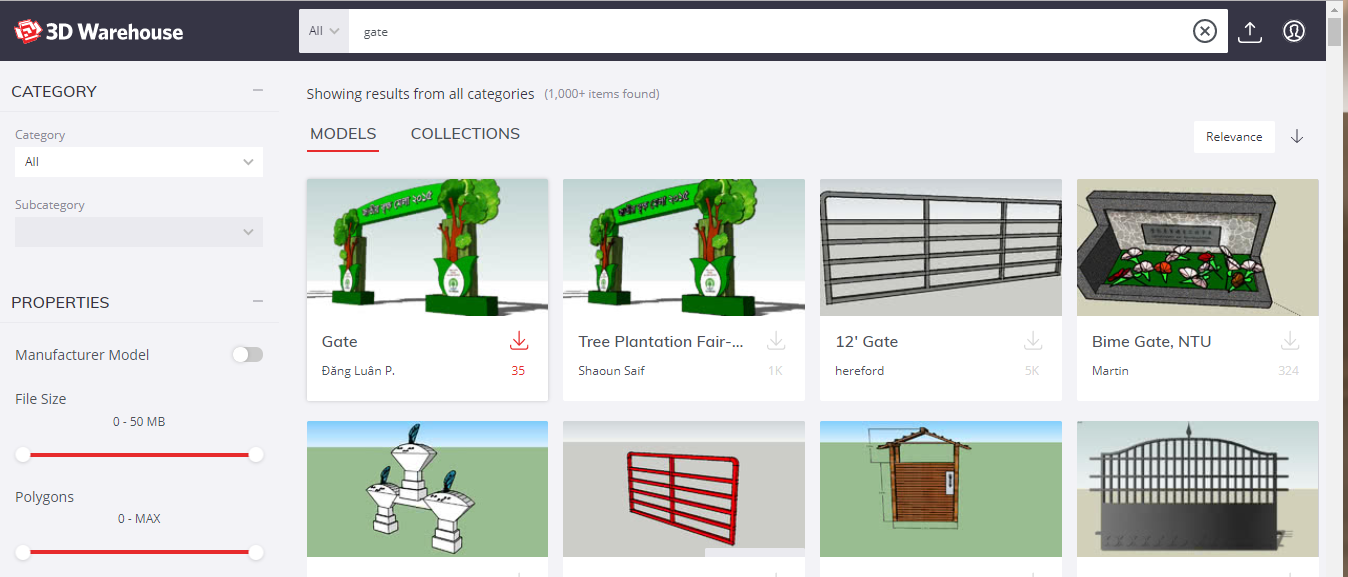
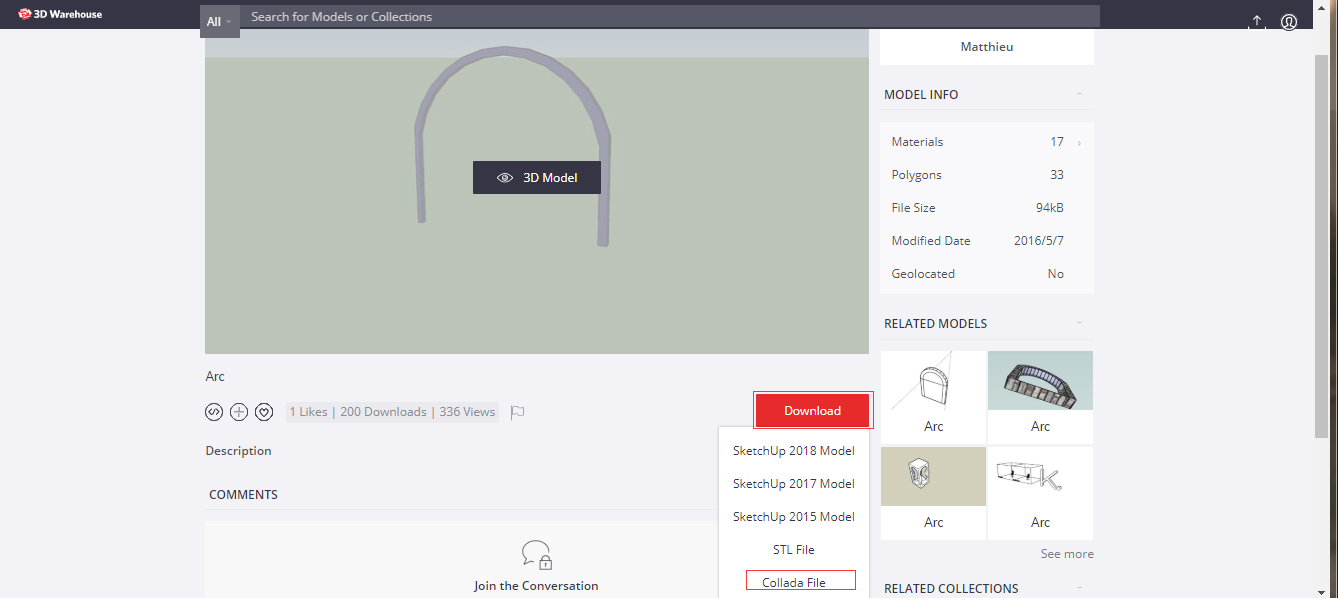
因此,我们可以在3D Warehouse上搜索关键词,然后找到想要的模型,点击进去后,以Collada File文件形式下载即可。
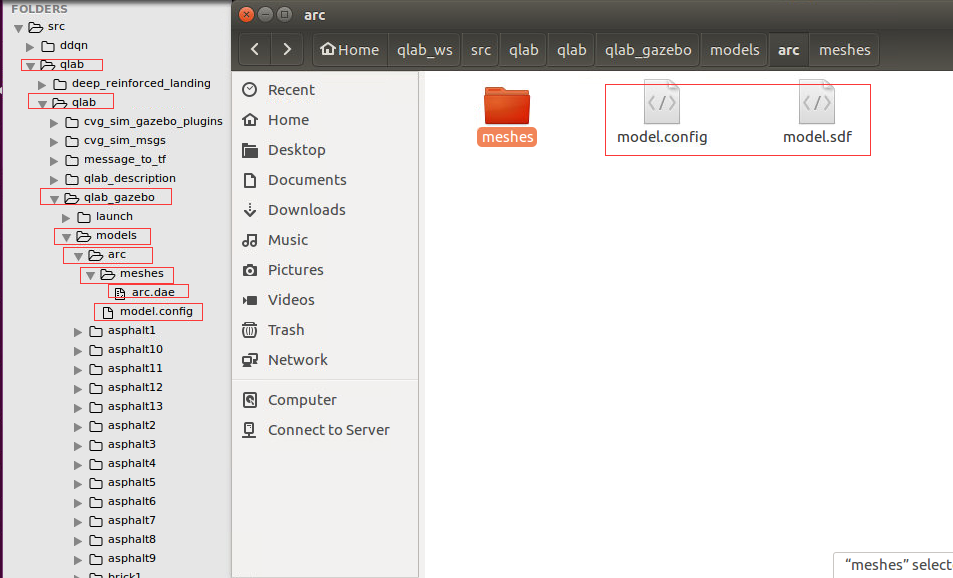
(1)下载完后,解压,解压后更改dae的名字。然后在gazebo_model_path的文件夹目录下创建相对应的模型文件,主要包括model.config、model.sdf文件和mesh文件夹(文件夹下只有dae文件)
其中,model.sdf文件内容如下:
1 | <?xml version="1.0" ?> |
(2)测试
创建arc.world文件,并将如下内容拷贝进去
1 | <?xml version="1.0"?> |
说明:上面代码中注销掉的部分如
file://arc.dae 是以文件形式导入,而后面model://arc/meshes/arc.dae 是以sdf形式导入。需要注意的是:需要使用
0.03 0.03 0.03 来对模型进行调节大小
(3)显示
运行gazebo arc.world
参考网址:http://gazebosim.org/tutorials?tut=import_mesh#PreparetheMesh
https://answers.ros.org/question/42529/how-to-import-collada-dae-files-into-gazebo-rosfuerte/
7、Gazebo场景纹理图重置
主要是我在做强化学习(DQN)训练的过程中,需要将纹理时常更换,因此在网上查找相关教程,最终实现了gazebo的场景重置
先看代码,后面在进行解释,该代码是从训练的代码中截取的部分,需要的内容全部都在了
1 | #!/usr/bin/env python |
说明:gazebo场景重置,主要用到两个rosservice,分别是
gazebo/delete_model和gazebo/spawn_sdf_model
在重置的过程中,首先需要先删除模型,即调用gazebo/delete_model服务,然后在重新生成,这时需要找到想要生成的模型的sdf文件所在位置,然后读取并调用gazebo/spawn_sdf_model服务,即可实现gazebo场景纹理图的重置
主要需要查看的帮助信息是
(1)roservice list:查找相关service服务
(2)rosservice info [service_name]:查找对应服务的数据类型
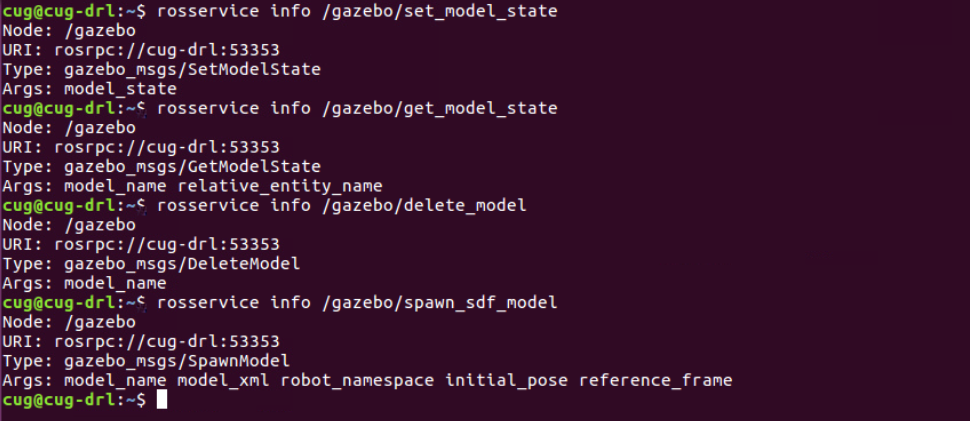
对其中一个进行解释说明:如
1 | objstate = SpawnModelRequest() |
这里就和/gazebo/spawn_sdf_model里面的Args对应,分别是model_name、model_xml、robot_namespace、initial_pose、reference_frame
又如:
1 | #重置特定模型位置 |
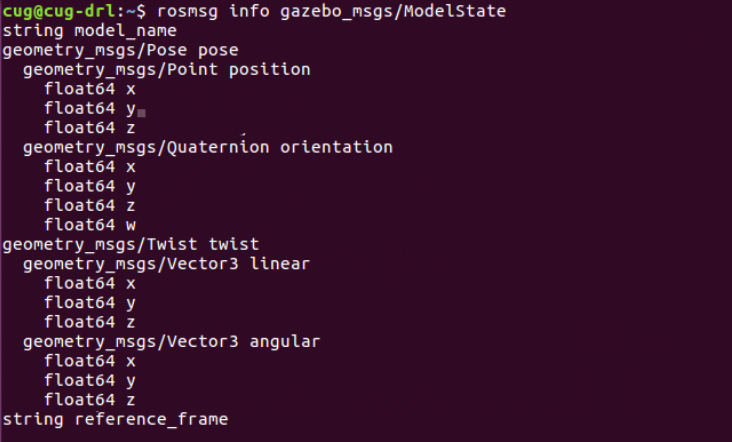
这里需要设置很多position和orientation和twist是因为如下图所示包含的信息