前言
主要记录ros的一些基本指令和gazebo及ardrone的一些名词解释和相互关系
1、名词解释
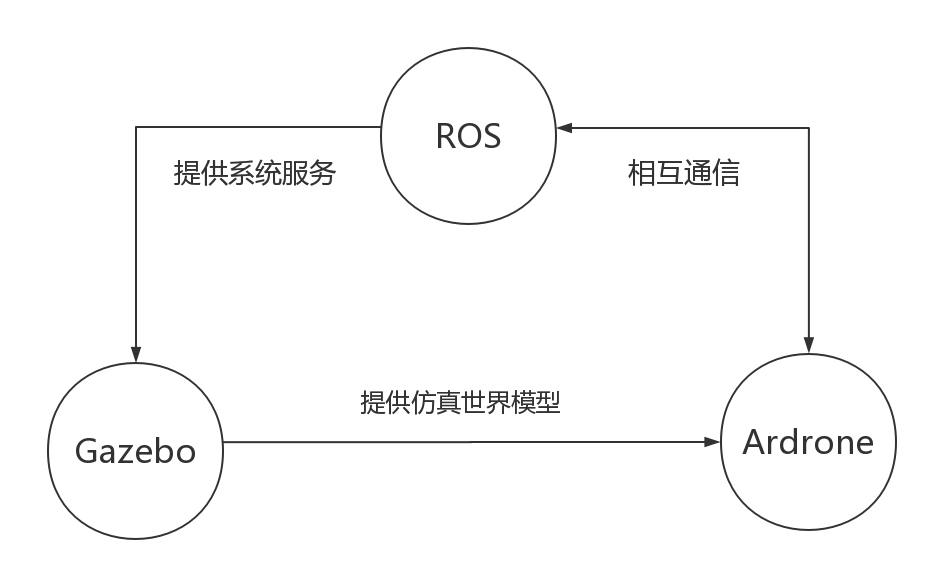
ROS:ROS(Robot Operating System, 机器人操作系统)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务:如硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。
Gazebo:可以主要用来进行机器人动力学的仿真。
Ardrone:四轴飞行器,支持ROS系统。
2、相互关系
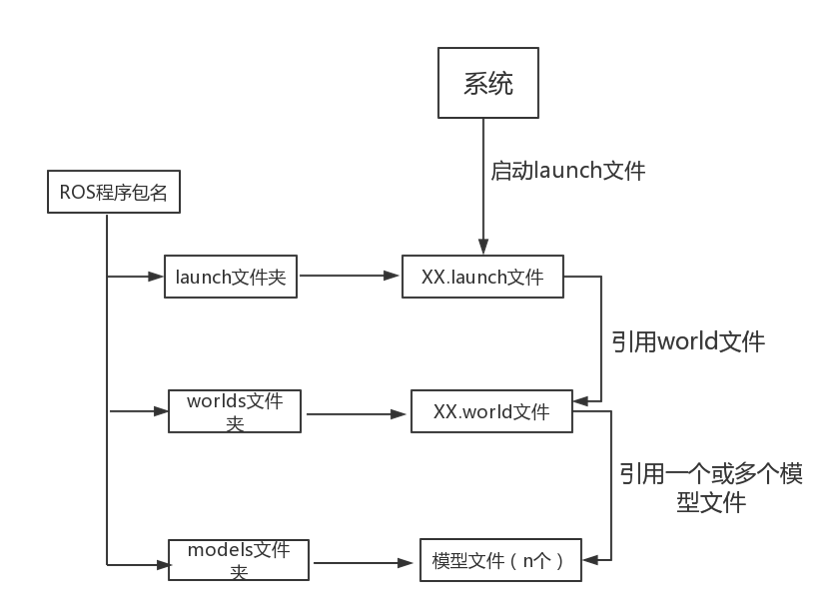
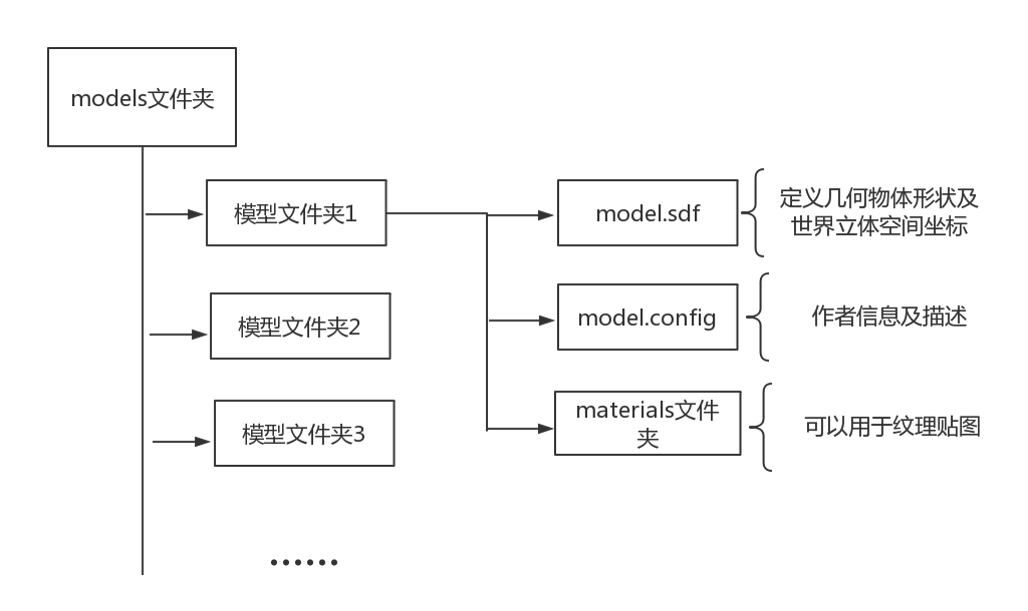
3、Gazebo基本组成部分
4、ROS基本概念
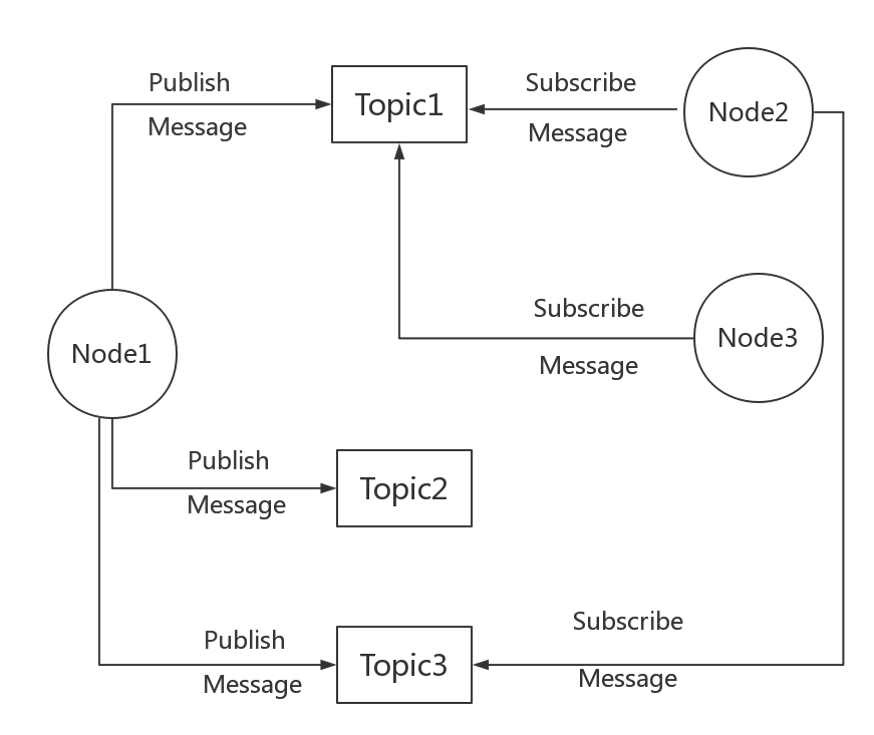
节点(node):一个节点即为一个可执行文件,它可以通过ROS与其他节点进行通信
例子:咱们有一个机器人,和一个遥控器,那么这个机器人和遥控器开始工作后,就是两个节点。遥控器起到了下达指 令的作用;机器人负责监听遥控器下达的指令,完成相应动作。从这里我们可以看出,节点是一个能执行特定工作任 务的工作单元,并且能够相互通信,从而实现一个机器人系统整体的功能。在这里我们把遥控器和机器人简单定义为两个节点,实际上在机器人中根据控制器、传感器、执行机构等不同组成模块,还可以将其进一步细分为更多的节点,这个是根据用户编写的程序来定义的。
消息(message):消息是一种ROS数据类型,用于订阅或发布到一个话题。
消息是一种数据结构,支持多种数据类型(整形、浮点、布尔型、数组等),同时也支持消息的嵌套定义。ROS提供了大量的系统默认消息供用户使用,如geometry_msgs、sensor_msgs等,同时也支持用户定义专属数据结构的消息类型。
话题(Topic):节点可以发布消息到话题,也可以订阅话题以接收消息。
话题是消息的载体,作用是用不同的名称区分不同消息。
话题与消息是紧密联系在一起的。话题就像公交车,消息是公交车里装的人。公交车里可以没有人(话题上没有有效消息),但能装什么人一定会预先指定(话题一定有类型)。整个公交网络中线路名称不能重复(话题名称不能重复),要是真有两个话题名称相同类型也相同,ROS不会对其中的数据做区分,这种冲突是没有提示的。
订阅/发布话题是不同步的,发布的人只管说话,订阅的人只管偷听,发布的人连续说了100句话,这100句话会排成一个队列,偷听的人要一句一句听,哦,对了,偷听的人可能不止一个服务(service):服务是应答响应模式下的信息交互方式。这种方式是基于客户端/服务器模型的。
与话题不同的是,当服务端收到服务请求后,会对请求做出响应,将数据的处理结果返回给客户端。这种模式更适用于双向同步的信息传输,在同一个ROS网络中节点指定服务名称时不能重名。当节点A找节点B借钱时,整个网络里只有一个B,谁要是冒充B借了钱,那他就是2B。
master:节点管理器,ROS名称服务 (比如帮助节点找到彼此)。
master是整个ROS运行的核心,它主要的功能就是登记注册节点、服务和话题的名称,并维护一个参数服务器。没有它你就甭想启动任何一个节点,roscore就是用来启动master的。
5、ROS Ardrone常用命令
起飞:
1
rostopic pub -1 /ardrone/takeoff std_msgs/Empty
降落
1
rostopic pub -1 /ardrone/land std_msgs/Empty
切换相机
1
rosservice call /ardrone/togglecam
获取前置相机图像
1
rosrun image_view image_view image:=/ardrone/front/image_raw
获取下置相机图像
1
rosrun image_view image_view image:=/ardrone/bottom/image_raw
6、ROS常用信息显示
(1)rostopic list :显示所有的话题信息
(2)rostopic echo [topic] :显示发布的话题的数据信息
如:rostopic echo /ardrone/navdata
(3)rostopic type [topic]:返回发布的话题的消息类型
(4)rostopic show ardrone_autonomy/Navdata:显示ardrone_autonomy/Navdata
参考网址:ros官网