前言
在刚开始接触Airsim的过程中,其环境是在Windows下搭建的,而平常用的ros做机器人的开发已经习惯了,因此就尝试了在Windows下配置ROS环境
一、前提
- 已经装好Visual Studio 2017 社区版,并且安装路径是默认安装位置路径
因为最开始修改了默认安装位置路径,在安装过程中出现了一些小问题,后来按照默认安装路径安装测试的
二、ROS安装
2.1 创建快捷方式并配置
桌面空白处,右键,新建快捷方式
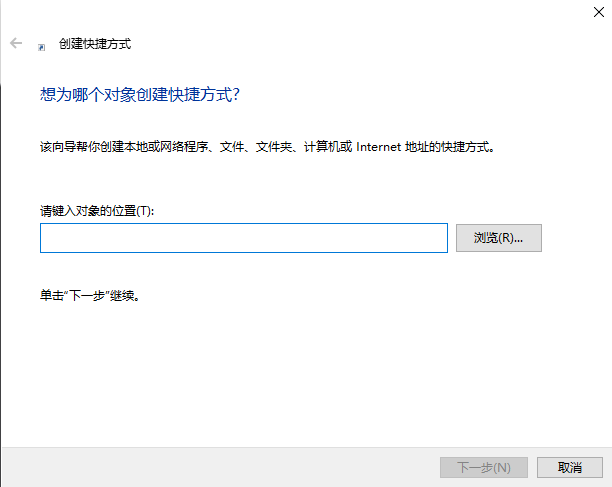
在输入框中,复制粘贴如下内容
1 | C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2017\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 |
命名快捷方式为ROS
将该快捷方式设置为Administrator
右键单击快捷方式,然后选择“属性”
选择
快捷方式选项卡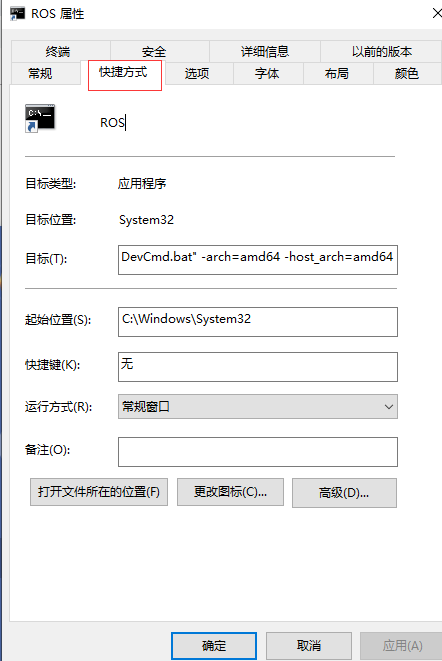
点击
高级按钮,在高级属性中选中用管理员身份运行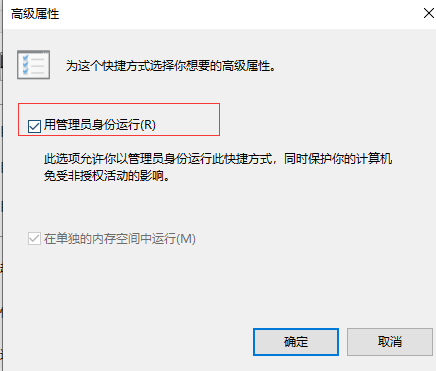
在所有需要点击
确定的地方点击确定,以进行保存
2.2 安装Chocolatey 和Git
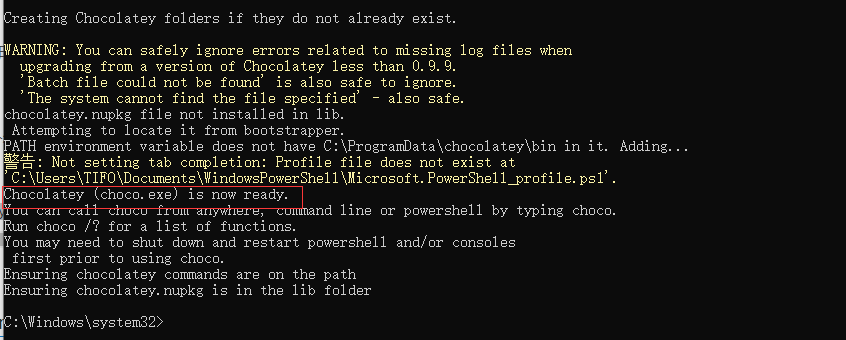
(1)安装Chocolatey
在windows下,找到命令提示符,以管理员身份运行,然后输入如下代码,安装Chocolatey
1 | @"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin" |
最终,窗口出现Chocolatey is now ready,则安装成功
(2)安装git
打开之前创建的ROS命令提示符
输入如下命令,安装git:
1 | choco install git -y |
安装完成后,关掉ros窗口,重新打开,输入
1 | git --version |
检查,git是否安装成功
2.3 ROS安装
输入如下命令,进行ros的安装,安装过程有点久
1 | choco source add -n=ros-win -s="https://roswin.azurewebsites.net/api/v2" --priority=1 |
在安装的过程中,可能会报错,然后多次输入
1 | choco upgrade ros-melodic-desktop -y |
进行重装,或者输入
1 | choco upgrade ros-melodic-desktop --force |
或者,输入
1 | choco upgrade ros-melodic-desktop_full -y --execution-timeout = 0 |
最后,有点懵的就装好了,安装成功后,会在C盘根目录下有opt\ros的文件夹
三、ROS测试
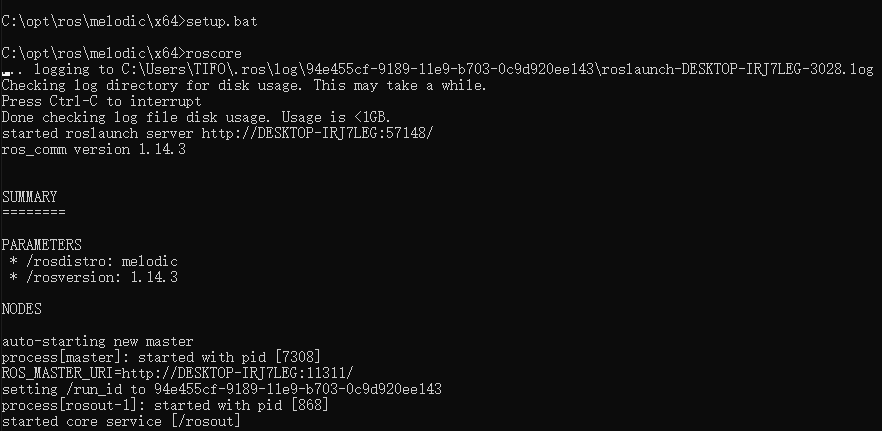
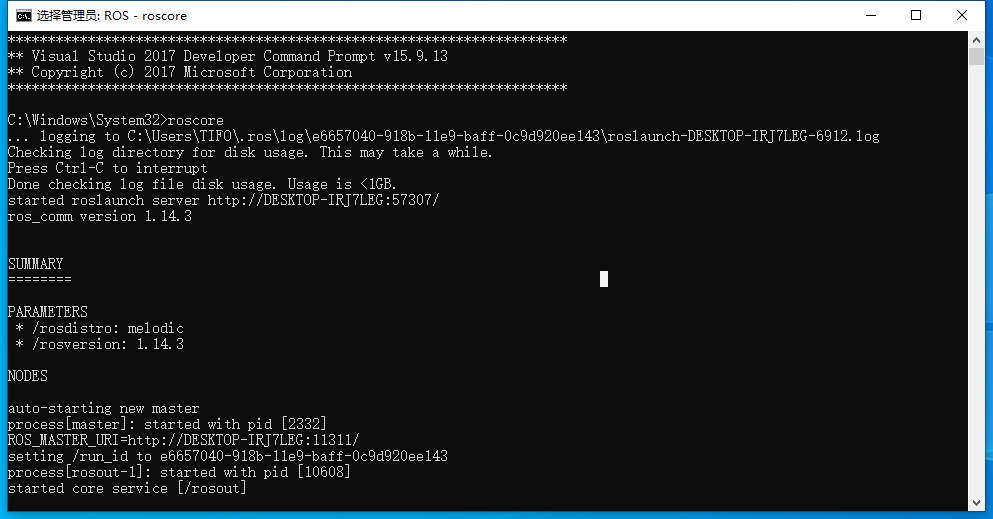
(1)打开一个ROS窗口
首先要进入到x64的目录下,运行setup.bat,这个就有点类似于linux的source devel/setup.bash一样
1 | cd C:\opt\ros\melodic\x64 |
最终出现如下界面则安装成功
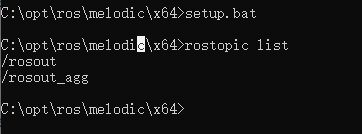
(2)查看rostopic
打开另一个ros窗口
1 | cd C:\opt\ros\melodic\x64 |
四、ROS命令简化配置
在第三步的测试过程中,每次输入ros相关的命令,都要先进入到x64目录下,然后运行setup.bat,甚是麻烦,因此才有了下面的简化配置,配置好后,直接在ros窗口输入命令即可
选中
ROS快捷方式,右键,打开属性选择
快捷方式选项卡,找到目标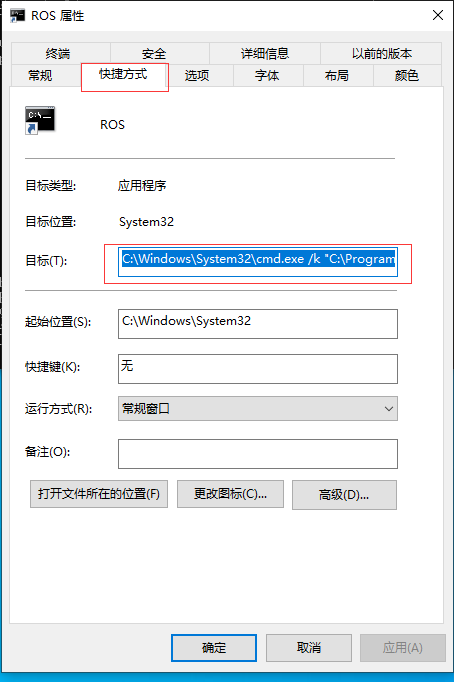
然后复制粘贴如下内容,进行替换
1
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2017\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64 && C:\opt\ros\melodic\x64\setup.bat
重新打开ros窗口,即可直接输入roscore,启动ros管理器
参考网址:
ros wiki:ros will 官网
博客:古月居
总结
至此,windows下的ros环境就已经配好了,后续可以做其他的操作,但是需要安装一些软件包
如: msgpack-rpc-python 、airsim