前言
这篇博客,更多的是记录一下ubuntu下QGC的安装及使用,Airsim的SITL配置以及如何添加UE4的定制场景等。但是在Airsim的HITL配置方面还没有成功过
相关关键词
- QGC
- SITL
- PX4
一、PX4 SITL配置
1.1 设置dialout用户
1 | sudo usermod -a -G dialout $USER |
执行完后,注销,重新登录,重启更好
1.2 安装Pixhawk/Nuttx(and JMAVSim)
在桌面新建sh文件,并命名为:
ubuntu_sim_nuttx.sh
点击此处,拷贝ubuntu_sim_nuttx.sh源代码,粘贴到刚才新建的ubuntu_sim_nuttx.sh文件中
修改权限,并执行sh文件
1 | chmod u+x ubuntu_sim_nuttx.sh |
下载过程中,有些需要提示的地方进行确认,下载完成后,重启计算机
1.3 获取PX4源码
1 | mkdir -p PX4 |
1.4 编译
要确保到 PX4/Fireware 目录下,然后执行如下命令进行编译
1 | make posix_sitl_ekf2 none_iris |
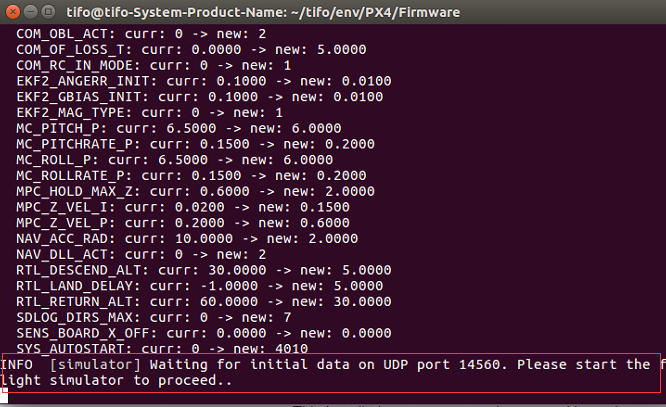
编译完成后,窗口会出现等待UDP连接的提示
二、QGC和Mavros的安装
2.1 QGC安装
(1)下载QGC
下载QGC,请点击此处
(2)修改权限
1 | cd ~/Downloads |
(3)运行QGC
1 | ./QGroundControl.AppImage |
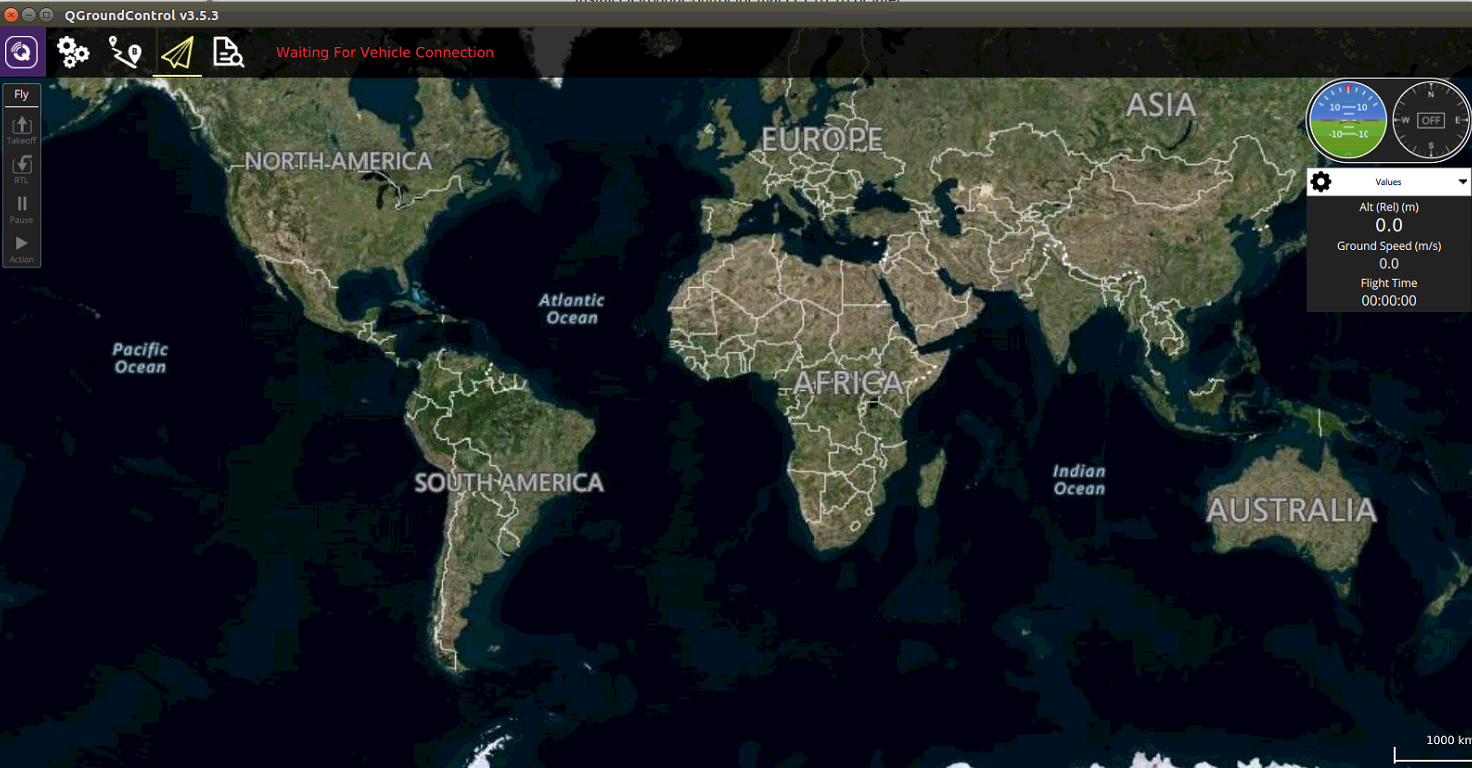
最终,会弹出QGC窗口
2.2 mavros和mavlink的源码安装
2.2.1 二进制安装方式
(1)安装mavros
1 | sudo apt-get install ros-kinetic-mavros ros-kinetic-mavros-extras |
(2)安装GeographicLib
1 | wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh |
2.2.2 源码安装
(1)创建工作空间
1 | mkdir -p ~/catkin_ws/src |
(2)安装mavlink
1 | rosinstall_generator --rosdistro kinetic mavlink | tee /tmp/mavros.rosinstall |
(3)安装mavros
1 | rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall |
(3)更新
1 | wstool merge -t src /tmp/mavros.rosinstall |
(4)安装GeograohicLib
1 | sudo su |
(5)编译
1 | catkin build |
(6)source
1 | source devel/setup.bash |
2.3 安装相关依赖包
1 | sudo apt-get install python-catkin-tools |
三、测试
首先,将前面所打开的所有UE4界面和终端窗口全部关掉
3.1 settions.json配置
需要将settion.json里面的配置修改为PX4配置
settions.json文件在~/Documents/Airsim目录下
配置信息修改如下:
1 | { |
3.2 SITL连接和QGC连接
(1)编译posix_sitl
进入到PX4/Fireware目录下,编译
1 | make posix_sitl_ekf2 none_iris |
编译完成后,等待UDP的链接
(2)打开QGC
进入到 QGroundControl.AppImage 所在目录,打开QGC
1 | ./QGroundControl.AppImage |
打开后,也会等待无人机的连接
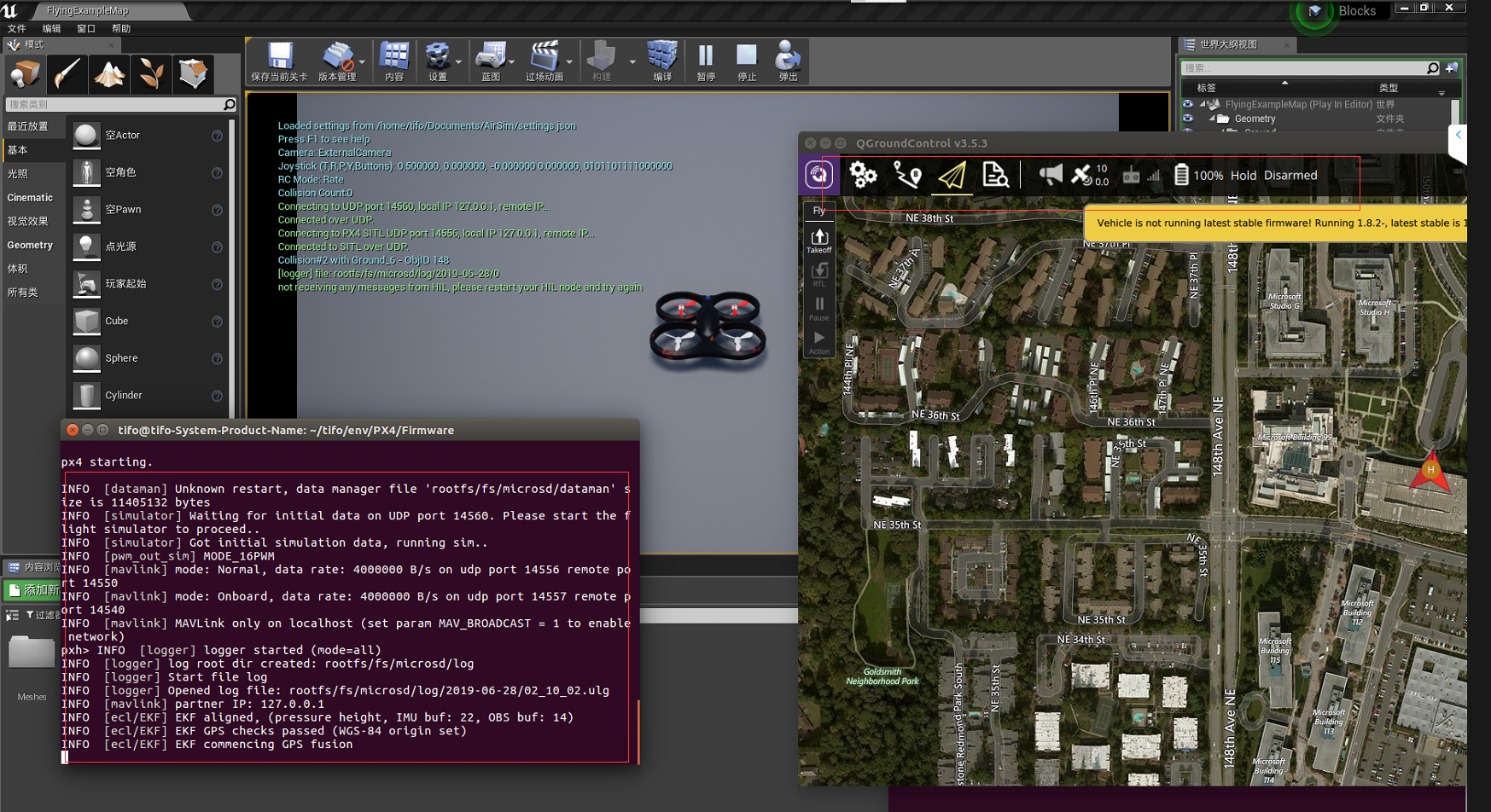
(3)打开UE4Editor
双击运行 UnrealEngine/Engine/Binaries/Linux/UE4Editor 文件,选择之前添加的插件Blocks,原来的Rolling没有AirsimGameMode
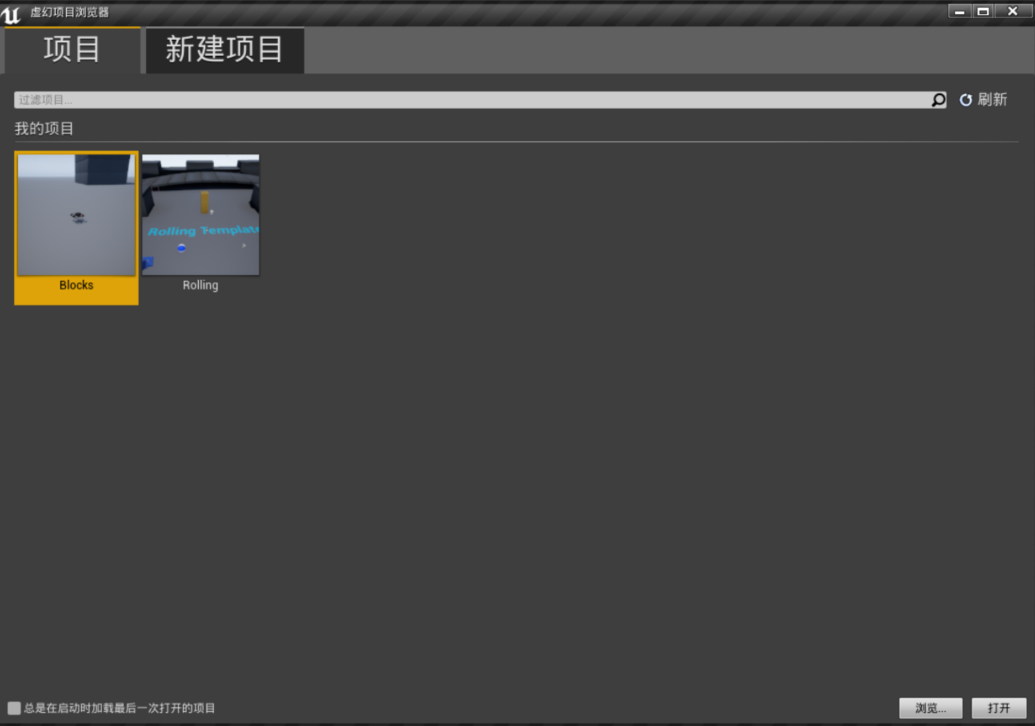
点击打开后,点击播放,加载出来后,会发现PX4 的UDP已经连接上,QGC也已经连接上
3.3 测试
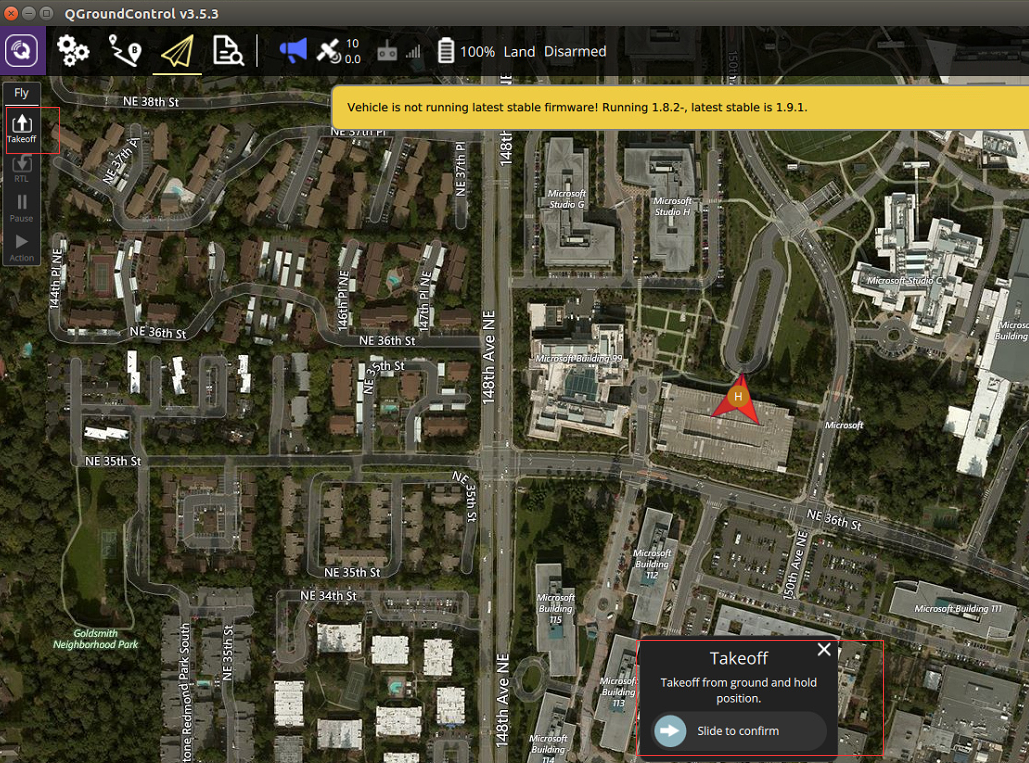
3.3.1 QGC起飞测试
点击QGC的起飞按钮,并滑动确定,最终Multirotor会起飞
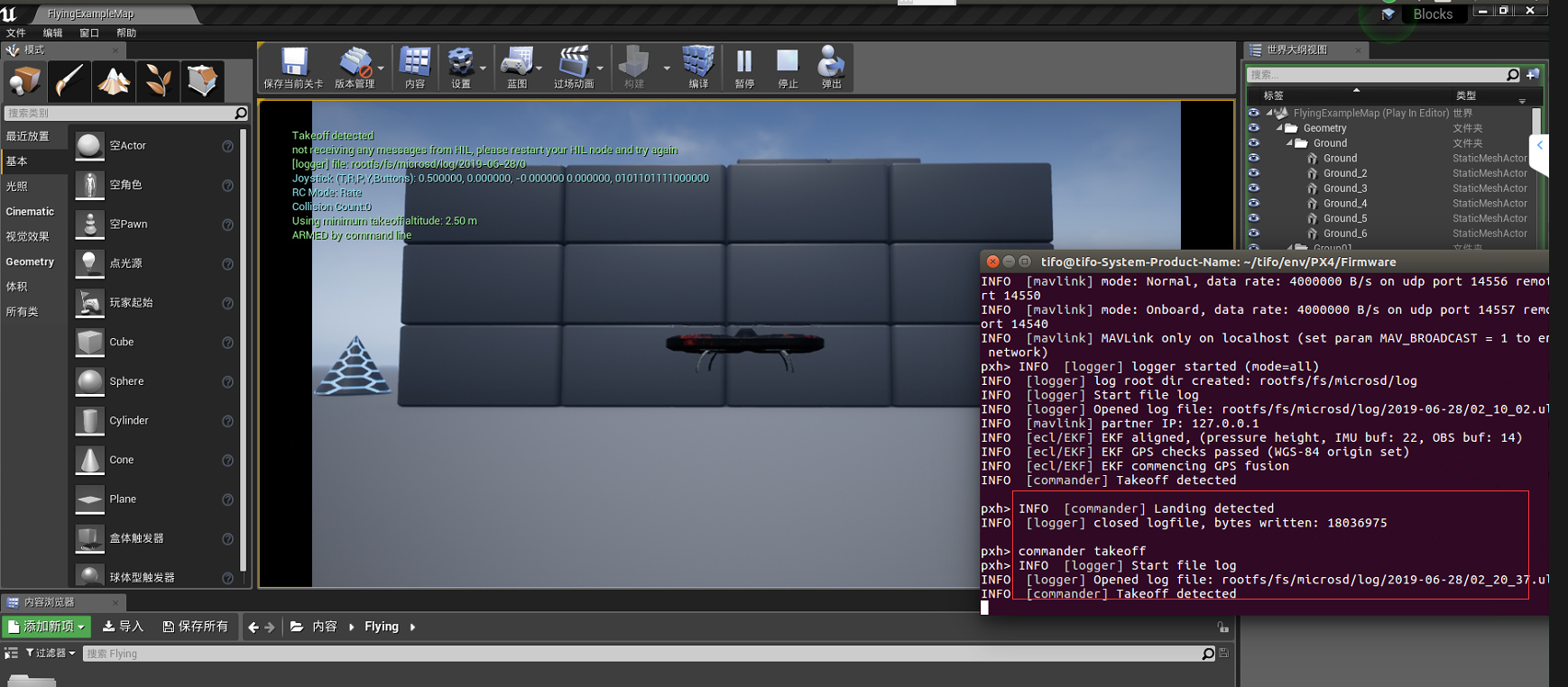
3.3.2 Firmware窗口命令起飞降落测试
在之前的等待UDP连接的窗口上输入命令测试
1 | commander takeoff |
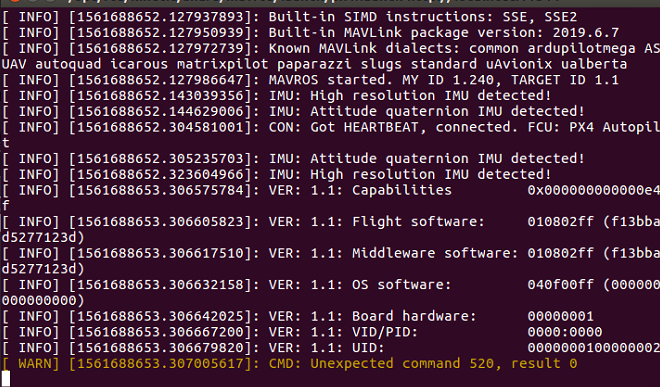
3.3.3 ros命令测试
打开一个新终端,执行如下命令
1 | roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557" |
此时,可以通过调用service服务,来实现起飞
打开新终端,执行下面命令,能执行起飞降落
1 | rosservice call /mavros/cmd/arming true |
rostopic list信息查看
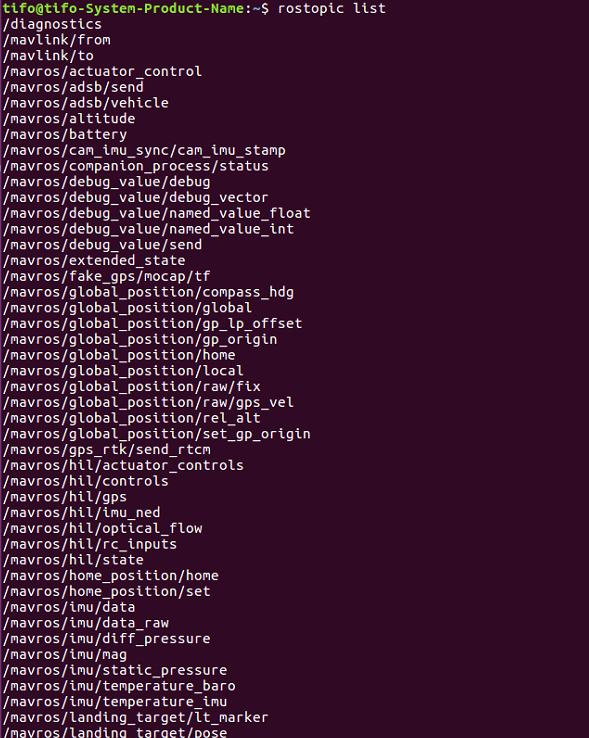
rosservice 命令结果输出
输出要为true才有效

四、添加城市道路场景
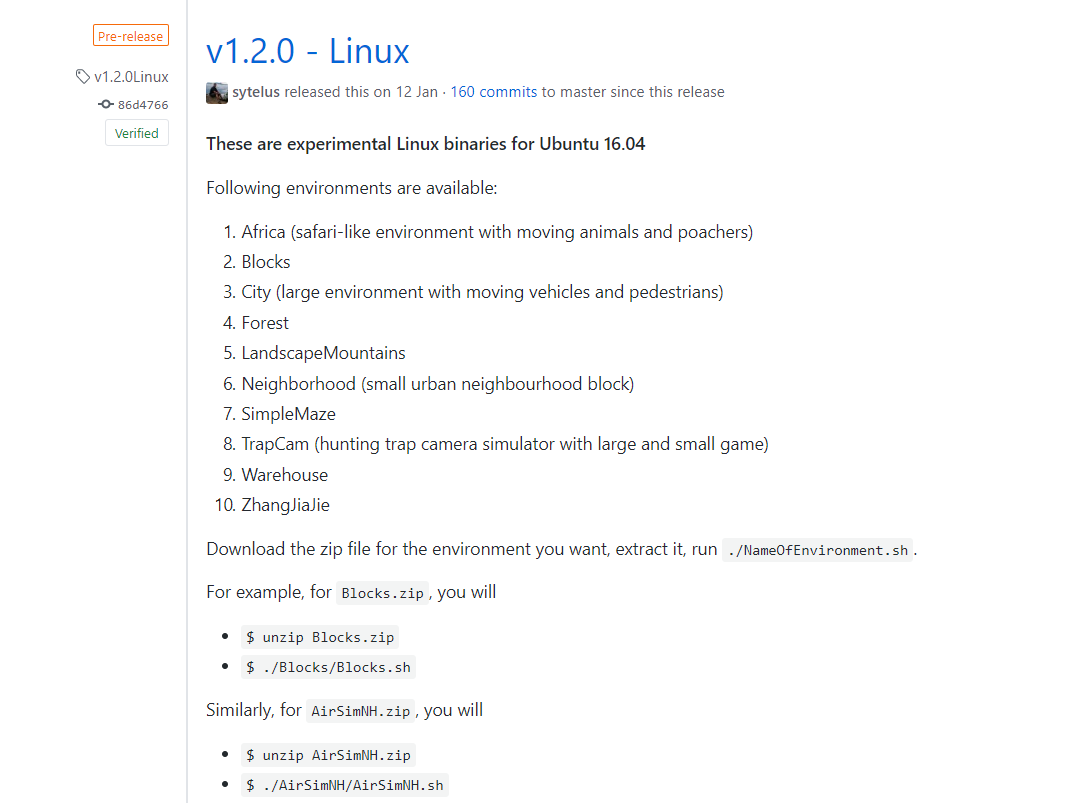
Airsim有一些关于UE4的城市道路场景,但是在linux下我成功加载的目前只有两个,总共没测试过几个,能成功加载的是Africa、和Neighborhood,其中有加载过关于City的,但是这是两个zip.001这样的文件组成的,目前还没有解压成功(Linux下),在windows下应该能成功解压
在打开下载的这些场景时,setting.json的配置信息不能修改为SITL的配置,为最初始的默认配置即可
(1)下载场景
下载场景,请点击此处
(2)加载场景
首先下载的场景,要为如下的文件结构才行
windows的场景为exe文件,linux下的为sh文件,如果没有sh文件这样,则不能加载
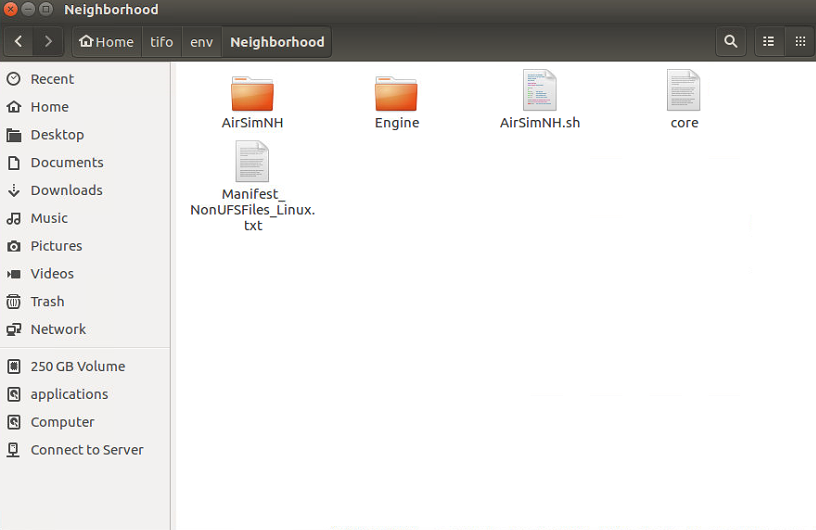
在新终端执行如下命令加载(进入到AirSimNH.sh文件所在目录)
1 | ./AirSimNH.sh |
同理,Africa的场景也是同样的方式
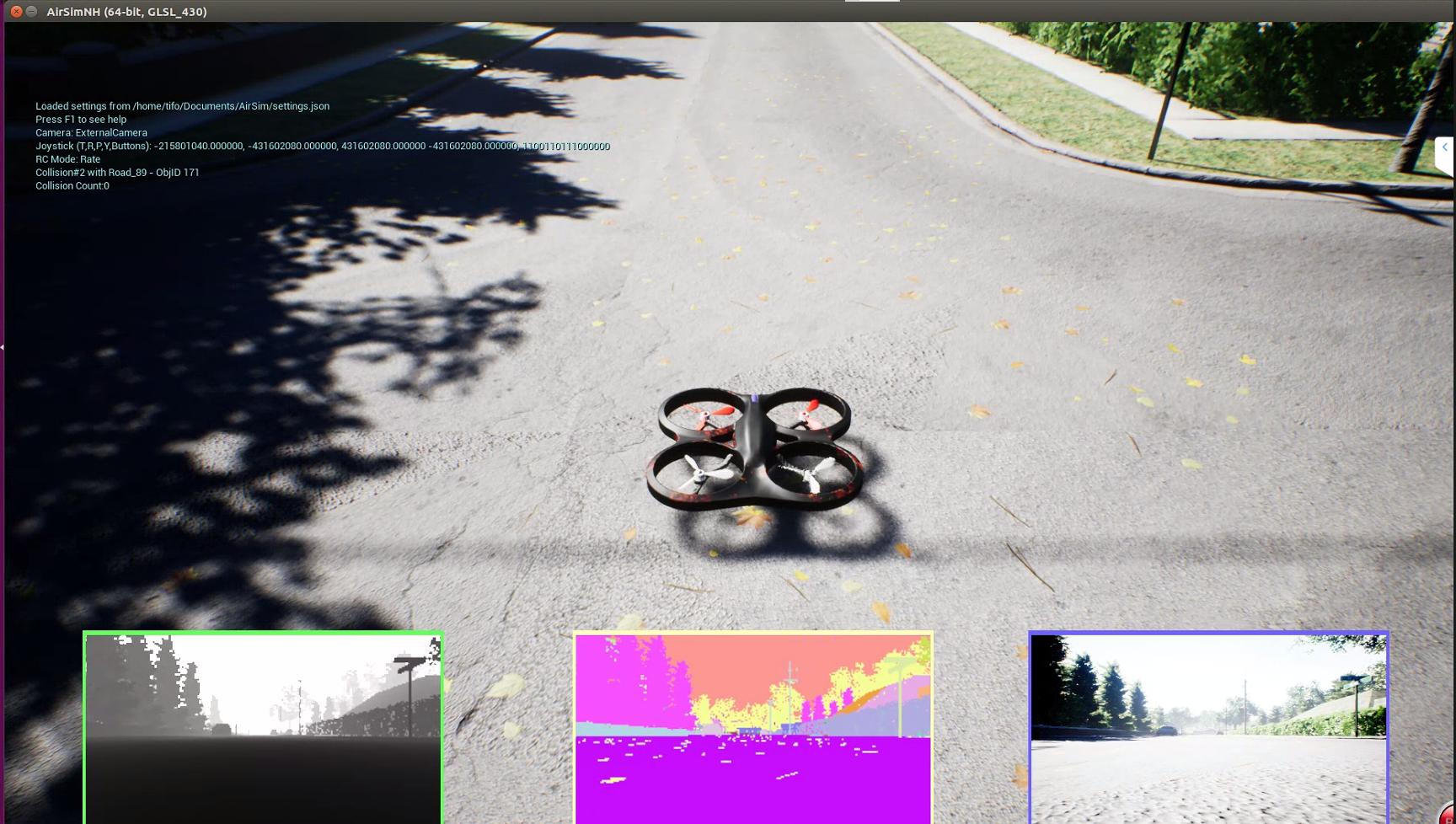
五、SITL与.sh文件不兼容
如果下载了github上提供的AirSimNH.sh环境,并运行sh文件时,将会出现第四部分的图片,但是却不能设置SITL,这样就很难受
通过浏览多方资料,发现了其可能的解决办法(未尝试,但是应该是没问题的),这个解释挺好的。通过浏览Airsim上的doc文档,看到了其他的相关的UE4场景,并且有免费的可以下载,具体步骤参照教学视频。本来准备下载的,结果在windows没有下载下来,也就没有测试。其中的两个UE4场景下载网址分别为:
因此,只要在UE4的商城上,去下载AirSimNH的环境,这样就下载了AirSimNH.uproject插件,就可以在UE4Editor中添加uproject插件,并且配置SITL控制了。但是其环境,是需要购买的。消费就是另一个问题了。
参考网址
- PX4 SITL配置:Airsim Github官网
- QGC安装:QGC官网
- Mavros安装:mavos官网
- settings配置:github文档
- roslaunch测试:PX4官网
总结
总的来说,Airsim的SITL配置没有问题,但是要使用SITL时,必须打开UE4Editor,然后自己定义场景,而不能使用已经下载好的.sh场景,这个已经测试过。如果要是用城市道路场景,则在setting.json里面一定不能配置PX4的信息。
目前Airsim的HITL配置没有成功,主要是用的Pixhawk进行的测试,并且没有使用遥控器,在linux下不能利用QGC完成起飞,但是在Windows下可以
SITL或HITL都是利用mavros来完成通信的,这个可能会暂时告一段落,后面会自己利用Airsim提供的API,自己去写ROS节点,利用ROS来实现控制,并且可以利用ROS的通信机制,来完成另种方式的HITL控制