前言
在前面的四篇DQN强化学习算法中,主要是对价值函数进行了近似表示,这是只一种基于价值函数(Value Based)的方法,是基于状态价值函数V(s)或者动作价值函数Q(s,a)的控制问题解法。在确定性的环境中,当我们知道了每个状态价值函数V(s)的数值之后,策略就可以选择使得下一个状态期望状态价值函数最大的行动a。但是在随机的环境中状态价值函数V(s)就不太好用了,因为它不能直接指导我们进行行动的选择。因此,在控制问题中更常用的是动作价值函数Q(s,a),它描述了在某个状态s下采取不同的行动a产生的期望收益。但是这是一种间接的做法,那有没有更直接的做法呢?
有!那就是直接更新策略。本文将介绍一种更为直接的方式解决强化学习中的控制问题—策略梯度方法,它属于另一类,即基于策略的方法(Policy Based)。
一、论文题目
Policy Gradient Methods for Reinforcement Learning with Function Approximation
二、研究目标
研究一种更直接的方法解决强化学习中的控制问题,之前的控制方法是一种间接方法
三、问题定义
3.1 Value Based方法的局限性
- 首先,它面向的是确定性策略,而最优策略通常是随机的
- 其次,DQN系列方法对连续动作的处理能力不足。如果在一个连续空间内挑选动作,则Q值将会在无穷多的动作中计算价值,从而选择行为,这可吃不消
- 最后,算法收敛障碍。一个行动的估计值的任意小的变化可以导致它被选择或不被选择,这种不连续变化是算法保证收敛的一个关键障碍
3.2 Policy Based方法的优缺点
优点:
- 连续的动作空间(高维空间)中更加高效
- 可以实现随机化的策略
- 某种情况下,价值函数可能比较难以计算,而策略函数比较容易
缺点:
- 通常收敛到局部最优而非全局最后
- 评估一个策略通常低效(这个过程可能慢,但是具有更高的可变性,其中也会出现很多并不有效的尝试,且方差高)
四、Policy Gradient算法介绍
4.1 Value Based网络
在Value Based强化学习方法中,我们对价值函数进行了近似表示,引入了一个动作价值函数Q,这个函数由参数w描述,并接受状态s与动作a的输入,计算后得到近似的动作价值,即:
4.2 Policy Network
Policy Gradient 基本思想就是通过更新Policy Network来直接更新策略
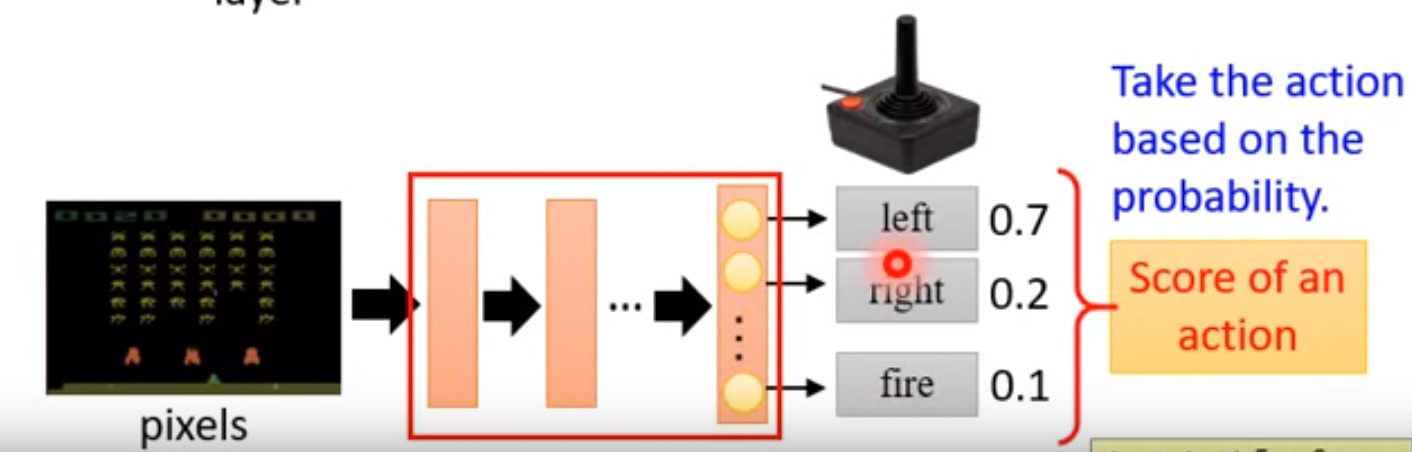
Policy Network:实际上就是一个神经网络,输入是状态,输出直接就是动作(不是Q值)
输出一般有以下两种方式:
- 概率方式:输出某一个动作的概率
- 确定性方式:输出具体的某一个动作
举例如下图所示:输入当前的状态,输出action的概率分布,选择概率最大的一个action作为要执行的操作。
在Policy Based强化学习方法下,我们采样类似的思路,只不过这时我们对策略进行近似表示。此时策略π可以被描述为一个包含参数θ的函数,即:
Policy Based的方法就是使用参数θ来逼近拟合状态值函数Vπ(s)和状态动作值函数Qπ(s,a)的分布。
将策略表示成一个连续的函数后,我们就可以用连续函数的优化方法来寻找最优的策略了。而最常用的方法就是梯度上升法了,那么这个梯度对应的优化目标如何定义呢?
4.3 更新Policy Network
Policy Gradient不通过误差反向传播,它通过观测信息选出一个行为直接进行反向传播,当然出人意料的是他并没有误差,而是利用reward奖励直接对选择行为的可能性进行增强和减弱,好的行为会被增加下一次被选中的概率,不好的行为会被减弱下次被选中的概率。
如果要更新 Policy Network 策略网络,或者说要使用梯度上升的方法来更新网络,需要有一个目标函数,且此时的策略Policy参数化为
使用model-free的方法,不借助与agent做决策而是将agent丢入不确定的动态环境下,不提供动态环境的信息,让agent自己瞎溜达根据所获得的策略信息更新参数。
对于所有强化学习的任务来说,其实目标都是使所有带衰减 reward 的累加期望最大。即如下式所示
4.3.1 策略梯度的目标函数
策略梯度的目标函数主要有以下三种方式
(1)最简单的目标函数就是初始状态收获的期望,即目标函数为:
(2)有的问题没有明确的初始状态,那么我们的目标函数可以定义为平均价值,即
其中,$d^{\pi\theta}(s)$是基于策略πθ生成的马尔科夫链关于状态的静态分布
(3)使用每次time-step的平均奖励:
为了改进策略,我们希望能够按照J(θ)的正梯度方向对π函数进行更新。假设θ是策略函数π的参数,本文的第一个基本结论为,无论上面哪种形式的J(θ),其梯度都可以被表示为(后面会稍微证明一下):
其中的
我们一般称为分值函数(score function)
我们暂定使用初始值法做目标函数
对该目标函数进行最大化也就是在搜索一组参数向量θ,使得目标函数最大。这实际做的事改变策略概率而非改变行动轨迹的工作,所以我们接下来就要使用梯度下降求解
在连续策略上选用Gaussian Policy,在离散策略下采用softmax Policy
4.3.2 策略梯度定理(The policy gradient theorem)
由于我们是基于model-free的所以无法事先知道动态环境的状态分布,而奖励函数又依赖于动作和状态分布,所以无法进行求导,所以我们需要把奖励采用无偏估计的方法计算出来,首先随机采样然后取均值来估计
假设一个只有一步的MDP,对它使用策略梯度下降。πθ(s,a)表示关于参数θ的函数,映射是P(a|s,θ)。它在状态s所执行-a动作的奖励为r = R(s,a)。那么选择动作a的奖励为πθ(s,a) * R(s,a):表示在该策略下所获得的奖励,在状态s的加权奖励为
推导过程如下:
由于
因此
梯度为:
假设策略πθ为零的时候可微,则
其中,d(s)是策略中的状态分布,π(s,a)是当前状态的动作概率分布,所以可以将策略梯度恢复成期望形式
且
为分值函数(score function)
然后在将似然率方式的策略梯度方法应用到多步MDPs上,此时因为奖励值应该为过程中的多步奖励值之和,在这里使用Qπ(s,a)代替单步奖励值R(s,a),对于任意可微的策略梯度如下(策略价值计算公式):
策略梯度定理详细推导过程如下

策略梯度公式已经求出,并且我们的分值函数也能求出,但是关于策略函数πθ(s,a)又是如何确定的呢?
4.3.3 策略函数的设计
常用的策略函数有两种,分别是softmax策略函数和高斯策略函数
现在回头看前面策略函数πθ(s,a)的设计,在之前它一直都是一个数学符号
softmax策略函数:主要应用于离散空间,softmax策略函数使用描述状态和行为的特征
与参数θ的线性组合来权衡一个行为发生的几率,即:
其中,
表示状态-动作对的L维特征向量
所以,其分值函数为:
高斯策略函数:应用于连续行为空间的一种常用策略,通常对于均值有一个参数化的表示,同样也可以是一些特征的线性代数和:
方差可以是固定值,也可以用参数化表示
行为对应于一个具体的数值,该数值以从
为均值,
为标准差的高斯分布中随机采样产生:
对应的分值函数是:
有了策略梯度和策略函数,我们就可以得到第一版的策略梯度算法了
4.4 蒙特卡洛策略梯度reinforce算法(不带基数)
针对具有完整Episode的情况,我们应用策略梯度理论,使用随机梯度上升来更新参数,对于公式里的期望,我们通过采样的形式来替代,即时候用t时刻的奖励(return)作为当前策略下行为价值的无偏估计,表现为:返回v(t)作为Qπ(st,at)的无偏估计,使用价值函数V(s)近似代替了Qπ(s,a)
策略梯度就可以为:
参数更新:
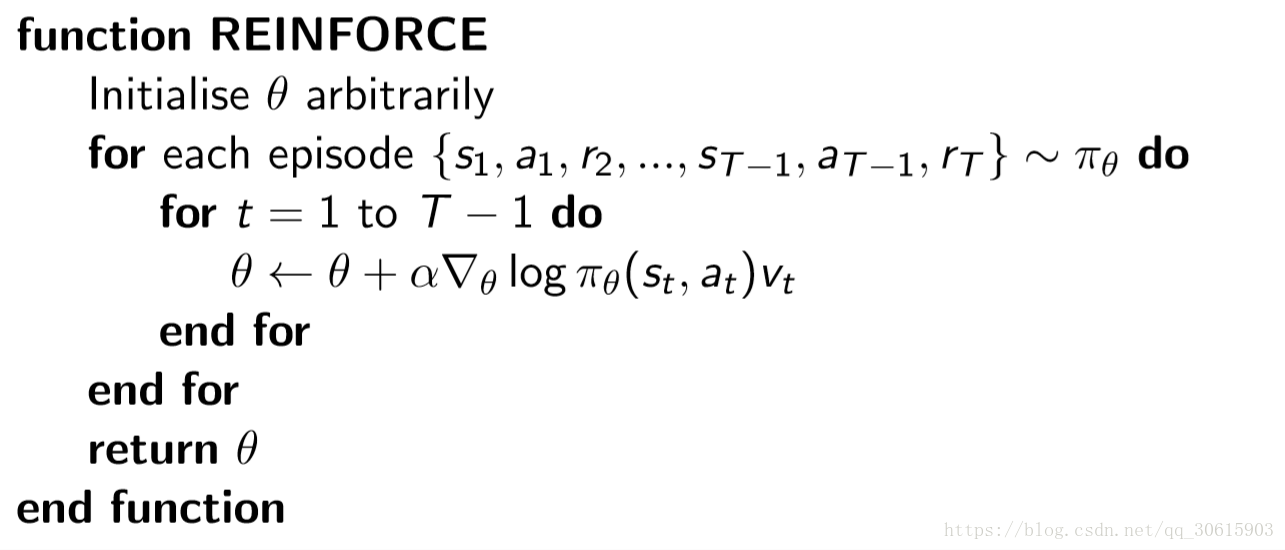
算法描述:先随机初始化策略函数的参数θ,对当前策略下的一个Episode:
从t=1 到t = T-1的每一个时刻,计算个体获得的奖励v(t) ,然后更新参数θ。如此重复每一个Episode,直到结束.
算法伪代码如下:
需要注意的是:
- 只有当一个Episode结束之后,我们才能得到该轨迹上各个状态对应的v(t)。因此该方法需要先采样一个完整的轨迹,然后在倒回来对每个状态更新参数
- 上面描述的Vt就是奖励,使用v而不是G可能考虑的是用它作为价值的期望,从这里也能看出这是有噪声的采样
但是该方法虽然是无偏的,但是方差非常大,所以运行速度也很慢。这个时候可以提出一个baseline来减少方差,那么如何选择baseline?
4.5 蒙特卡洛策略梯度reinforce算法(带基数)
在某些情况下,可能会出现每一个动作的奖励值都是正数,但是由于我们是通过采样的方式进行更新的,所以这时候可以引入一个基数b,则原式需要修改为
总结
PG算法主要是直接对策略进行更新,看过原文,对原文中有很多都没有较好的理解,因此就在网上浏览了很多的博客加强自己的理解,现在仍然比较懵,可能也是刚开始的原因,后面就要开始真真学习DRL的Policy Based方法了