前言
本篇主要是针对DRL论文阅读(一)中的论文题目来实现,其主要实现了第一部分标记检测,目前是只实现了单纹理下的训练。
其论文题目:Autonomous Quadrotor Landing using Deep Reinforcement Learning
一、基础环境搭建
1.1 版本说明
- Ubuntu16.04
- ROS Kinetic
- Gazebo8.6
1.2 Gazebo8.6安装
1 | sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list' |
安装好后,在终端输入gazebo8,出现如下界面,则安装成功
1.3 ros kinetic安装(不安装full版)
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
安装完后,终端输入roscore,输出的最后一行出现started core service [/roscore],则ros安装成功
1.4 安装必要ros包
1 | sudo apt-get install ros-kinetic-gazebo8-msgs |
1.5 已经安装默认的ros-kinetic?
如果机器已经默认安装了ros-kinetic-desktop-full,则会默认安装gazebo7版本。此时,需要先卸载gazebo7然后重新安装gazebo8
卸载ros-kinetic-desktop-full
1 | sudo apt-get remove ros-kinetic-desktop-full |
卸载gazebo7
1 | sudo apt-get remove gazebo* |
然后重新按照1.2节和1.3节和1.4节在做一遍,在1.3节的步骤中,其实是可以只执行到第四步即可的。因为其他的之前已经安装过了
1 | sudo apt-get install ros-kinetic-desktop |
二、搭建qlab实验环境
安装ros-kinetic-ardrone-autonomy
1 | sudo apt-get install ros-kinetic-ardrone-autonomy |
2.1 创建ros工作空间
创建工作空间
1 | mkdir qlab_ws |
编译和source
1 | cd ~/qlab_ws |
2.2 下载qlab源码
下载并拷贝完后,~/qlab_ws/src文件夹下将会有deep_reinforced_landing和qlab两个文件
1 | cd |
编译和source
1 | cd qlab_ws |
注:每次ros工作空间下拷贝或新建了新的程序包,都需要重新编译和source
2.3 启动测试
相关配置:因为在启动launch文件的时候,它里面会加载一些model模型,这些模型全部在qlab的文件夹下,因此需要在~/.bashrc文件下添加其路径,或者将modes文件夹全部拷贝到.gazebo文件夹下也可以.
(1)打开~/.bashrc文件
1 | sudo gedit ~/.bashrc |
(2)在最后一行添加如下代码
下面的username要修改为对应的机器的用户名
1 | export GAZEBO_MODEL_PATH="/home/username/qlab_ws/src/qlab/qlab_gazebo/models" |
(3)关闭~/.bashrc文件并source
1 | source ~/.bashrc |
启动qlab.launch
1 | cd ~/qlab_ws |
启动drl.launch
1 | cd ~/qlab_ws |
查看rostopic
常用的控制命令
1 | rostopic pub -1 /quadrotor/ardrone/takeoff std_msgs/Empty |
三、强化学习训练
3.1 修改相关配置
(1)修改无人机最大高度
因为在第一阶段训练的过程中,无人机的高度是固定在20m左右的,而其默认的最大高度为3m,因此需要先修改最大高度限定,可以修改为22m
在~/qlab_ws/src/qlab/qlab_description/urdf文件夹下找到quadrotor_sensors.urdf.xacro文件
然后在其中的第20行,将max_range的值由3.0修改为22.0

这样,无人机的最大高度就修改为了22
(2)训练时,需要关闭clinet,即关闭gazebo图形界面,提升训练速度
训练时,启动qlab.launch进行训练,则对qlab.launch文件进行修改
将其中的第七行的gui的值由true修改为false,如图所示
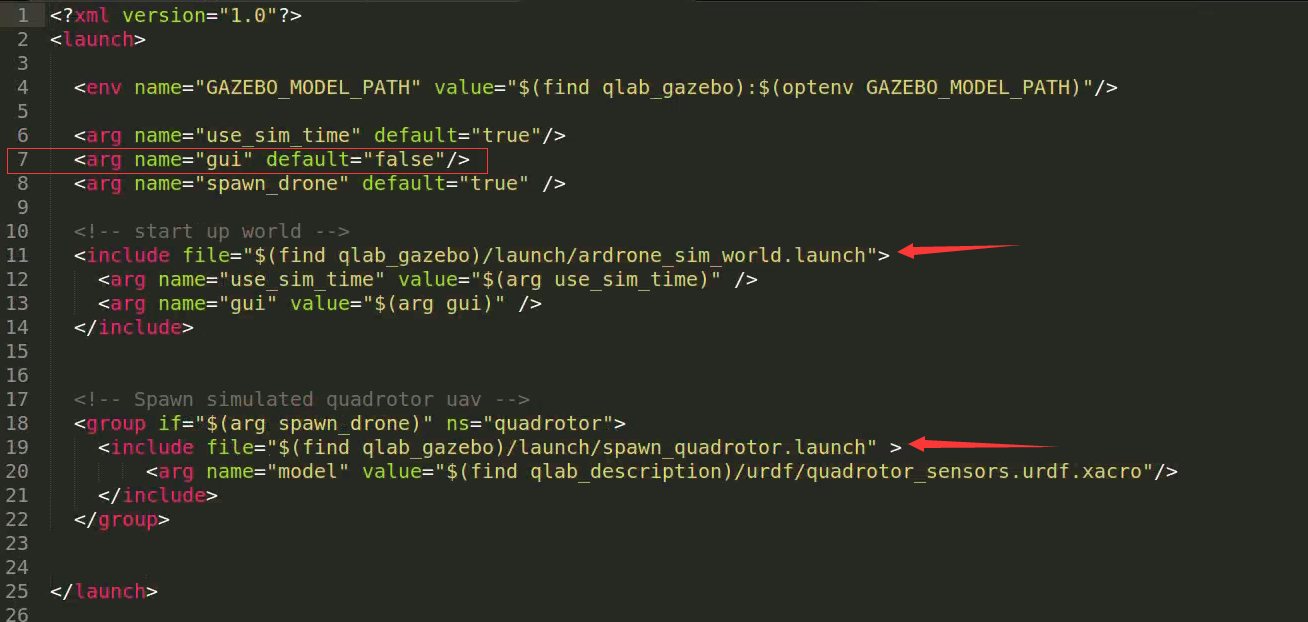
在该launch文件中,还引用了ardrone_sim_world.launch,因此也去这个launch文件中进行修改
同样的,找到第5行,将gui的值修改为false
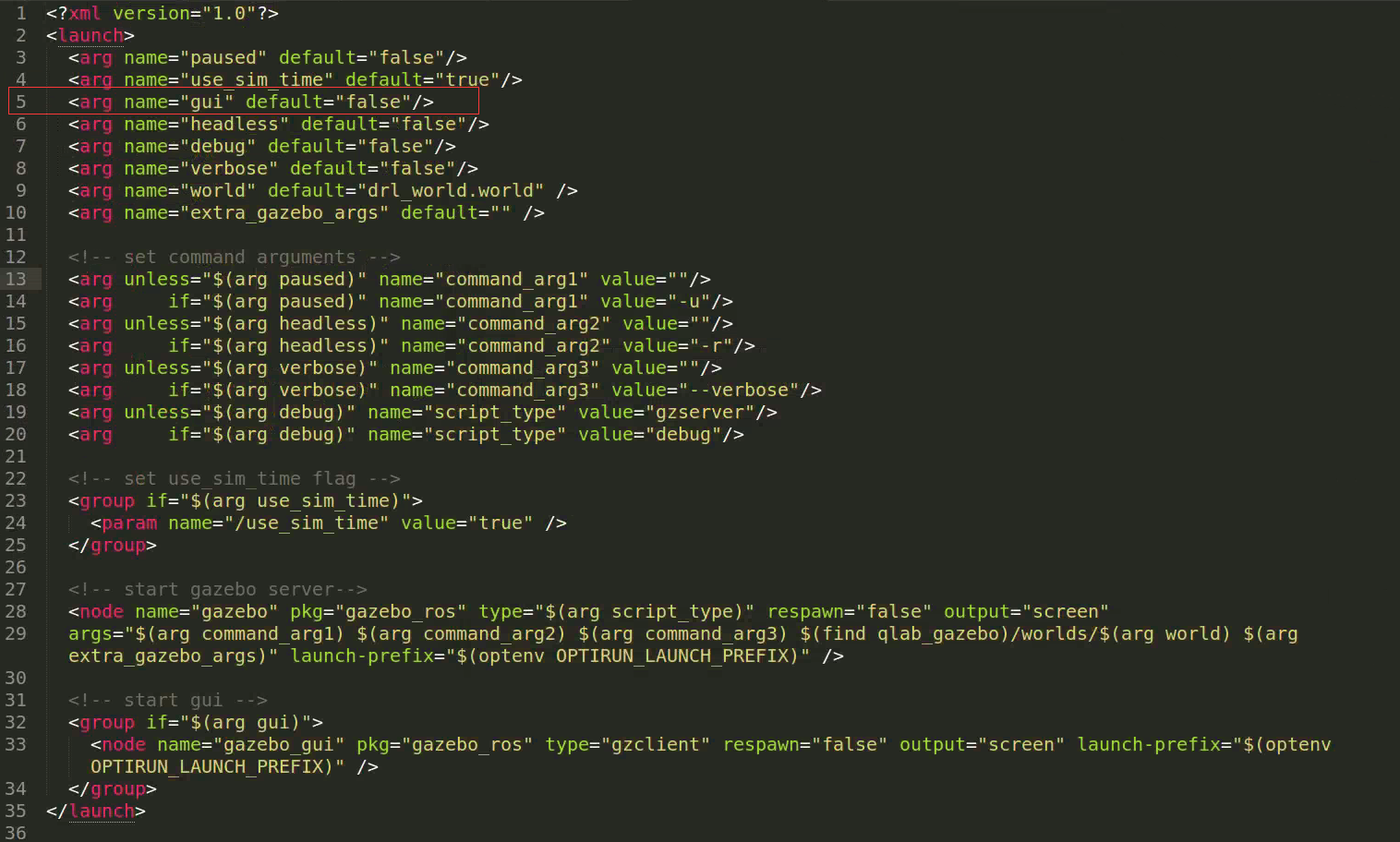
注:如果要关闭掉client的图像界面,则最好是在启动的相关的文件中,将所有的gui的值都设为false,这样比较保险
3.2 安装相关包
gym
可以采用pip安装,也可以采用源码安装方式
1
sudo pip install gym
Tensorflow:详细安装
3.3 DQN代码编写
下面的代码是在32G RAM、1080TI机器上跑的现在重新整理了代码,正在训练过程中~
直接查看所有代码
3.3.1 固定方向训练
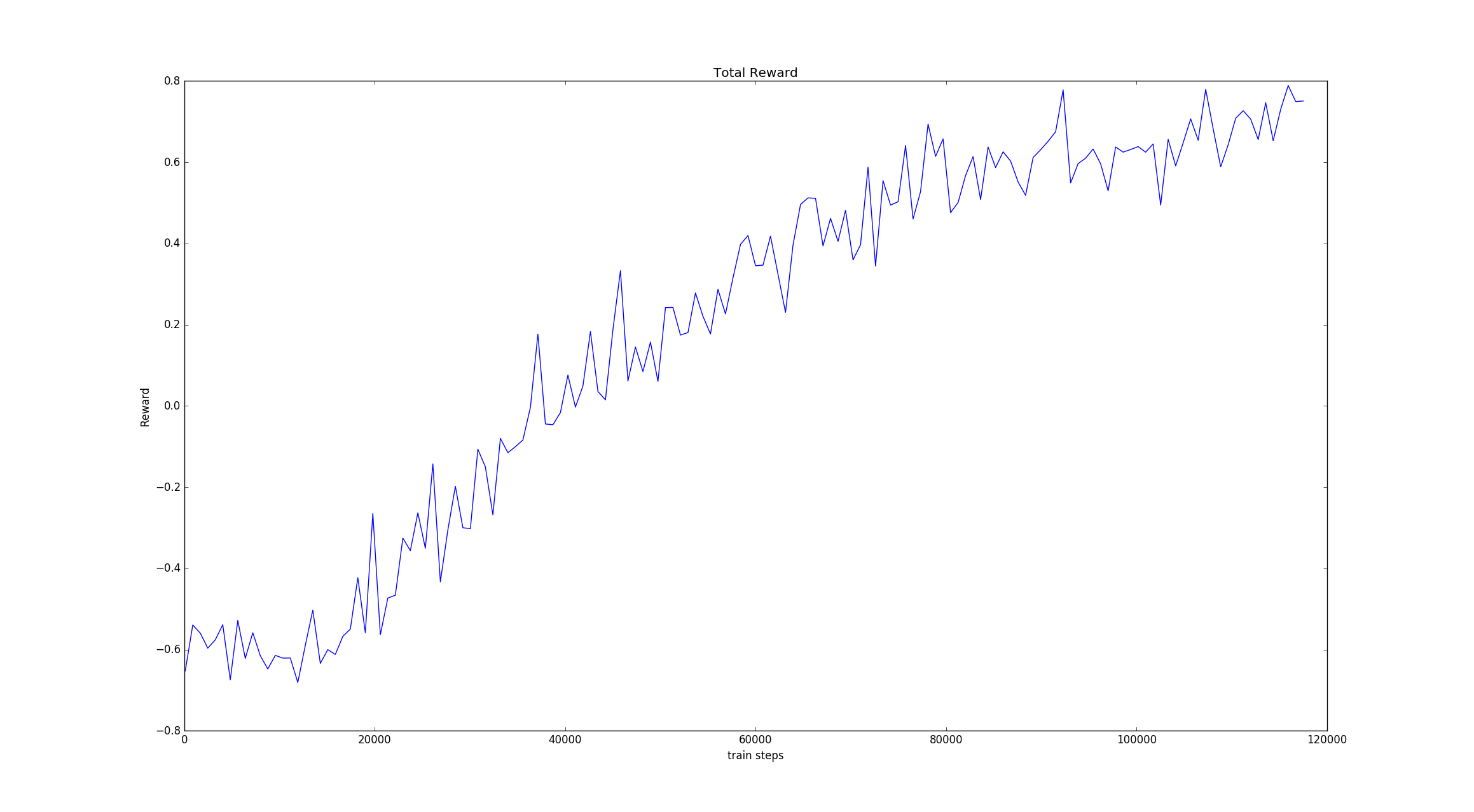
在该机器上,训练了差不多24h,不知道什么原因,电脑关机了,于是就只训练了不到12w步
于2019-8-17 10:35:40开始训练,2019.8.18 10.20 左右结束,可能更早
训练过程中的统计
| 1 | 正面奖励次数 | 负面奖励次数 | 强制截止次数 | 正面百分比 |
|---|---|---|---|---|
| 0-1(w) | 872 | 5844 | 3284 | 8.72% |
| 1-2 | 1183 | 5818 | 2999 | 11.83% |
| 2-3 | 2757 | 4895 | 2348 | 27.57% |
| 3-4 | 3952 | 3397 | 2651 | 39.52% |
| 4-5 | 4564 | 2514 | 2922 | 45.64% |
| 5-6 | 5724 | 2240 | 2036 | 57.24% |
| 6-7 | 7055 | 1713 | 1232 | 70.55% |
| 7-8 | 7597 | 1496 | 907 | 75.97% |
| 8-9 | 7870 | 1435 | 695 | 78.70% |
| 9-10 | 8128 | 1340 | 532 | 81.28% |
| 10-11 | 8499 | 1166 | 335 | 84.99% |
| 11-12(7504) | 6524 | 782 | 198 | 86.94% |
在训练场景下的dqn网络测试(后面会用其他不同场景测试,不用训练场景)
开始时间:2019.8.18 12:59:30,结束时间:2019.8-18 14:12:04
| 1 | 正面奖励次数 | 负面奖励次数 | 强制截止次数 | 正面百分比 |
|---|---|---|---|---|
| 0-1(w) | 8933 | 815 | 252 | 89.33% |
在训练场景下的随机飞行测试
开始时间:2019.8.18 10:27:21,结束时间:2019.8-18 12:25:23
| 1 | 正面奖励次数 | 负面奖励次数 | 强制截止次数 | 正面百分比 |
|---|---|---|---|---|
| 0-1(w) | 735 | 5316 | 3949 | 7.35% |
训练过程中的累积奖励图
3.3.2 随机方向训练
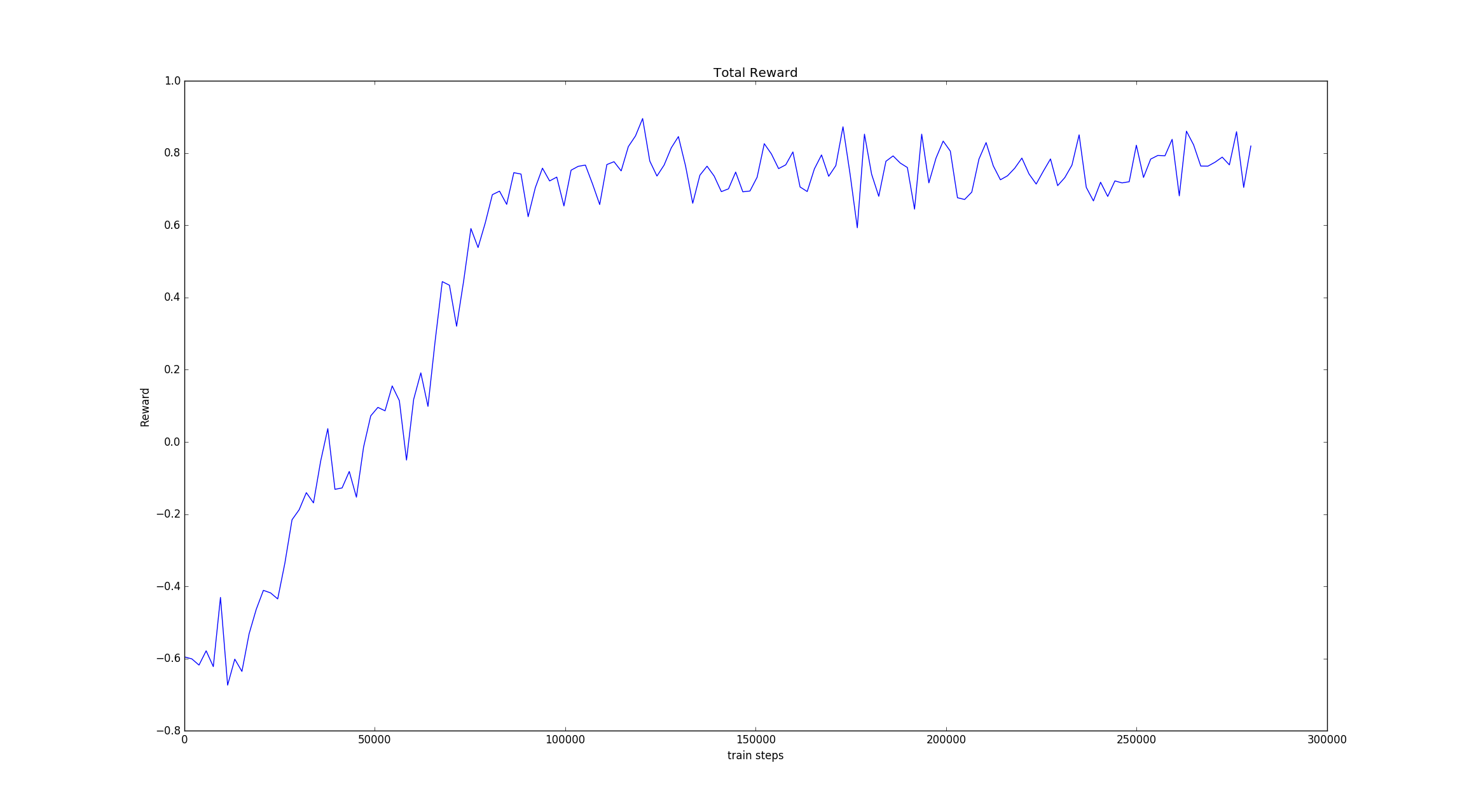
在该机器上,训练了接近2天的时间,总共训练了大概287000个episode,总飞行步数:2806854
从2019-8-22 11:42:55开始训练,到2019-8-24 09:58:30结束
训练过程中的统计
| 1 | 正面奖励次数 | 负面奖励次数 | 强制截止次数 | 正面百分比 |
|---|---|---|---|---|
| 0-1(w) | 886 | 5925 | 3189 | 8.86% |
| 1-2 | 1469 | 5496 | 3035 | 14.69 |
| 2-3 | 2401 | 4611 | 2988 | 24.01% |
| 3-4 | 3377 | 3362 | 3261 | 33.77% |
| 4-5 | 4152 | 2970 | 2878 | 41.52% |
| 5-6 | 4689 | 2721 | 2590 | 46.89% |
| 6-7 | 6125 | 2529 | 1346 | 61.25% |
| 7-8 | 8043 | 1846 | 111 | 80.43% |
| 8-9 | 8569 | 1366 | 65 | 85.69 |
| 9-10 | 8777 | 1177 | 46 | 87.77% |
| 10-11 | 9003 | 977 | 20 | 90.03% |
| 11-12 | 9103 | 890 | 7 | 91.03% |
| 12-13 | 9137 | 861 | 2 | 91.37% |
| 13-14 | 9132 | 861 | 7 | 91.32% |
| 14-15 | 9159 | 838 | 3 | 91.59% |
| 15-16 | 9191 | 803 | 6 | 91.91% |
| 16-17 | 9179 | 819 | 2 | 91.79% |
| 17-18 | 9195 | 799 | 6 | 91.95% |
| 18-19 | 9220 | 777 | 3 | 92.2% |
| 19-20 | 9159 | 834 | 7 | 91.59% |
| 20-21 | 9182 | 815 | 3 | 91.82% |
| 21-22 | 9214 | 778 | 8 | 92.14% |
| 22-23 | 9121 | 873 | 6 | 91.21% |
| 23-24 | 9146 | 850 | 4 | 91.46% |
| 24-25 | 9112 | 883 | 5 | 91.12% |
| 25-26 | 9204 | 792 | 4 | 92.04% |
| 26-27 | 9178 | 820 | 2 | 91.78% |
| 27-28 | 9200 | 797 | 3 | 92% |
在训练场景下的dqn网络测试(后面会用其他不同场景测试,不用训练场景)
开始时间:2019.8.24 10:05:04,结束时间:2019.8-24 11:11:34 总步数:59784
| 1 | 正面奖励次数 | 负面奖励次数 | 强制截止次数 | 正面百分比 |
|---|---|---|---|---|
| 0-1(w) | 9278 | 721 | 1 | 92.78% |
训练过程中的累积奖励图
总结
这是做的第一个DRL的强化学习代码训练,最开始确实花了很多功夫,并且状态空间很大,需要有一个好的机器,训练速度才会快,我最开始是在服务器上8G、CPU上进行的训练,耗费了一个多月才训练完单纹理的目标检测阶段。机器尤为重要。