前言
mavros包允许在运行ROS的计算机、支持MAVLink的飞控板以及支持MAVLink的地面站之间通讯。MAVROS可以用来与任何支持MAVLink的飞控板通讯。
基于mavros和mavlink协议,实现对airsim的控制
说明
针对上一节中mavros的配置,在安装./install_geographiclib_datasets.sh(二进制安装)或者./src/mavros/mavros/scripts/install_geographiclib_datasets.sh(源码安装)时,最好加上proxychains4,即翻墙安装,因为在重新测试的过程中,初始没有加proxychains4,启动launch文件时,一直报GeographicLib exception相关的错误。
错误提示信息
1 | [FATAL] [1455208235.573568497]: UAS: GeographicLib exception: File not readable /usr/share/GeographicLib/geoids/egm96-5.pgm | Run install_geographiclib_dataset.sh script in order to install Geoid Model dataset! |
并且,参考网上的方法都没有作用:参考1、参考2,其实这两种方法说的都是同一种,即加权限重新安装。
最后在安装时,添加了proxychains4后,则没有报错,上一节也已经更新。
一、mavros控制
前提:已经按照上一节的配置,安装了mavros、mavlink及PX4的编译等,且settings.json也配置为PX4
1.1 启动环境
(1)编译PX4
编译,等待UDP的连接
1 | cd PX4/Firmware |
(2)运行UE4Editor,启动UE4环境,加载airsim
UE4Editor文件在~/UnrealEngine/Engine/Binaries/Linux/目录下
双击运行UE4Editor即可
(3)启动px4.launch文件
1 | cd ~/catkin_ws |
1.2 mavros控制
基于UE4Editor启动,并加载的Rolling环境
(1)起飞降落的命令控制
根据GPS的坐标进行起飞降落控制,目前还不能通过命令实现drone的飞行
1 | rosservice call /mavros/cmd/arming true |
1.2.1 代码组成
主要是参考darknight-007/docking的代码,并对他/她的代码进行测试,发现存在一点问题,于是在testVelocityControl.py中添加了自己的代码,目前飞行没有问题,主要基于速度控制实现了一个长方形的飞行控制,其轨迹图见3.4
直接查看所有代码
主要包含三部分,PID.py、VelocityController.py、testVelocityControl.py。其中PID.py和VelocityController.py和参考的代码完全一致,没有做改动,主要是修改testVelocityControl.py等
1.2.2 testVelocityControl.py结构
目前起飞时通过设置的GPS坐标来起飞的,即不论drone在哪,都会在设置的GPS点处进行起飞,虽然降落同样也是设置的和起飞的GPS坐标差不多,但是它是当前位置降落
关于起飞和降落这一部分还存在一些问题
1 | #轨迹点(4个轨迹点,起飞后依次到达,实现长方形的飞行控制) |
二、rviz安装及测试
安装rviz,是为了实时显示drone的飞行轨迹,轨迹也可以用QGC来显示,但是没有rviz好
2.1 rviz安装
安装rviz
1 | sudo apt-get install ros-kinetic-rviz |
环境检测及安装
在使用rosmake rviz命令的时候,提示我没有rosmake,因此在第2步,先安装了rosmake
1 | rosdep install rviz |
2.2 运行rviz
在新终端运行roscore,启动rosmaster
1 | roscore |
在另一个新终端运行rviz
1 | rosrun rviz rviz |
三、rviz实时显示mavros控制飞行轨迹
3.1 启动UE4环境
参照1.1节
3.2 mavros控制代码里面发布相关topic
通过使用nav_msgs/Path来实现,其结构为
1 | std_msgs/Header header |
(1)添加相关代码(不完整)
主要是先获取drone的当前姿态数据,其数据结构见上,然后将该数据用nav_msgs/Path发布出去
1 | from geometry_msgs.msg import Pose, PoseStamped |
3.3 启动rviz
目前是通过在终端输入命令来启动rviz的,其实也可以写在launch文件里面
(1)命令启动rviz
由于3.1节里启动了px4.launch文件,因此不需要再启动roscore
1 | rosrun rviz rviz |
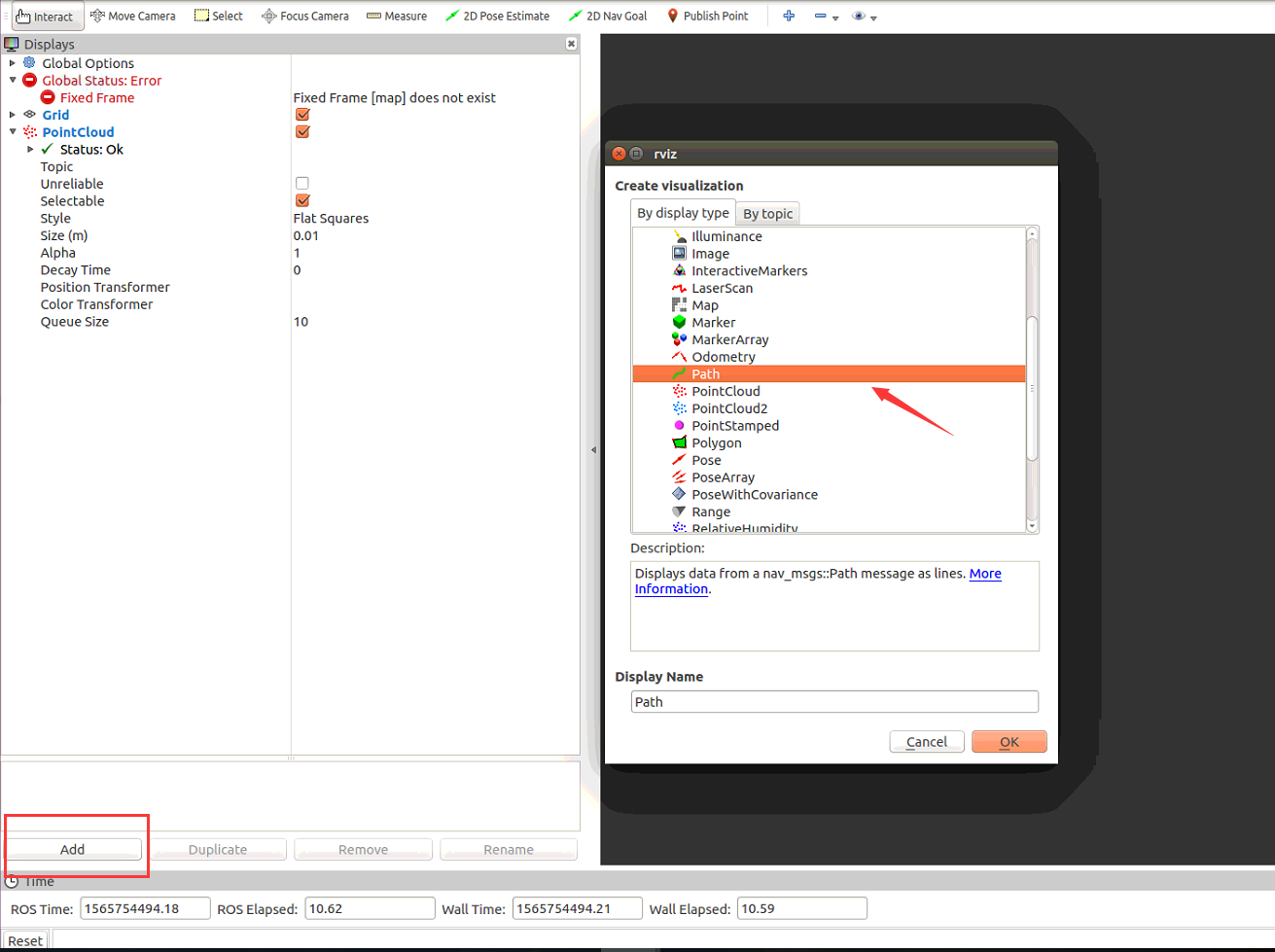
(2)添加代码中发布的相关的topic
在打开的rviz界面中,点击Add,然后选择添加Path
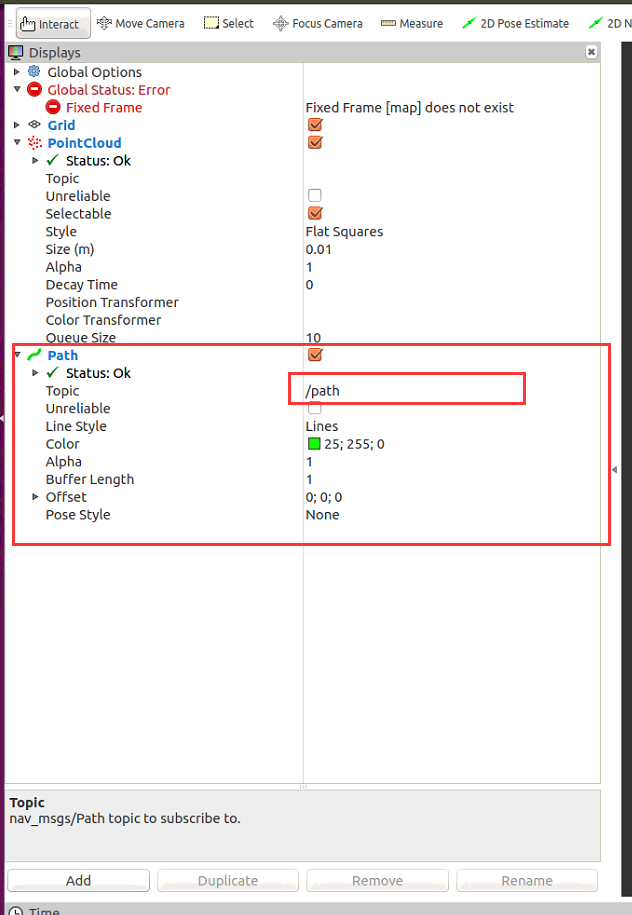
则会看到,左边多出了Path的相关信息,然后在Topic的右侧写入刚才发布的topic(/path)
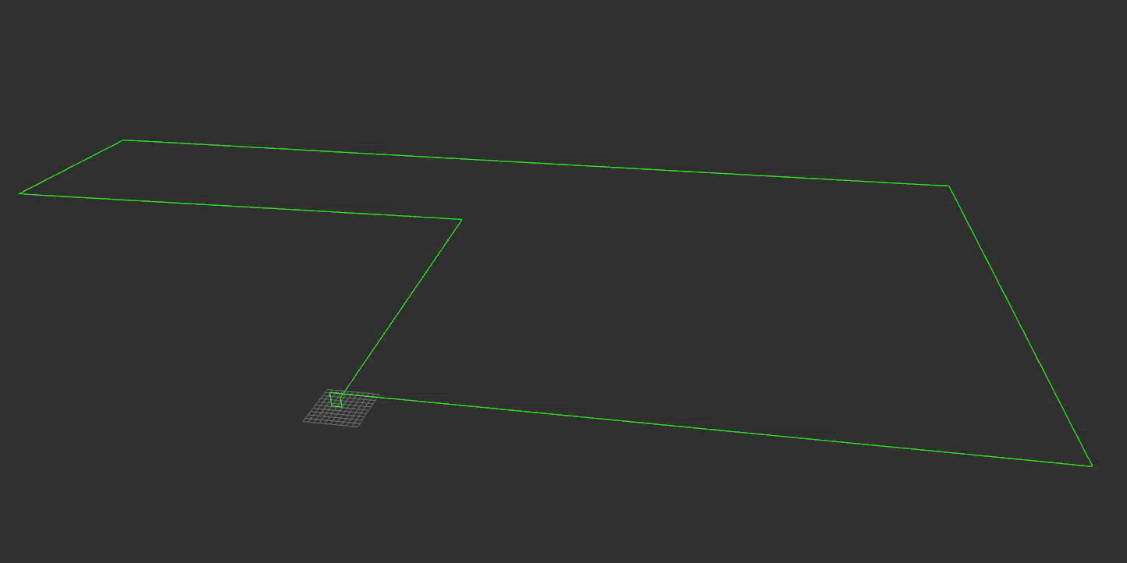
3.4 运行mavros控制代码
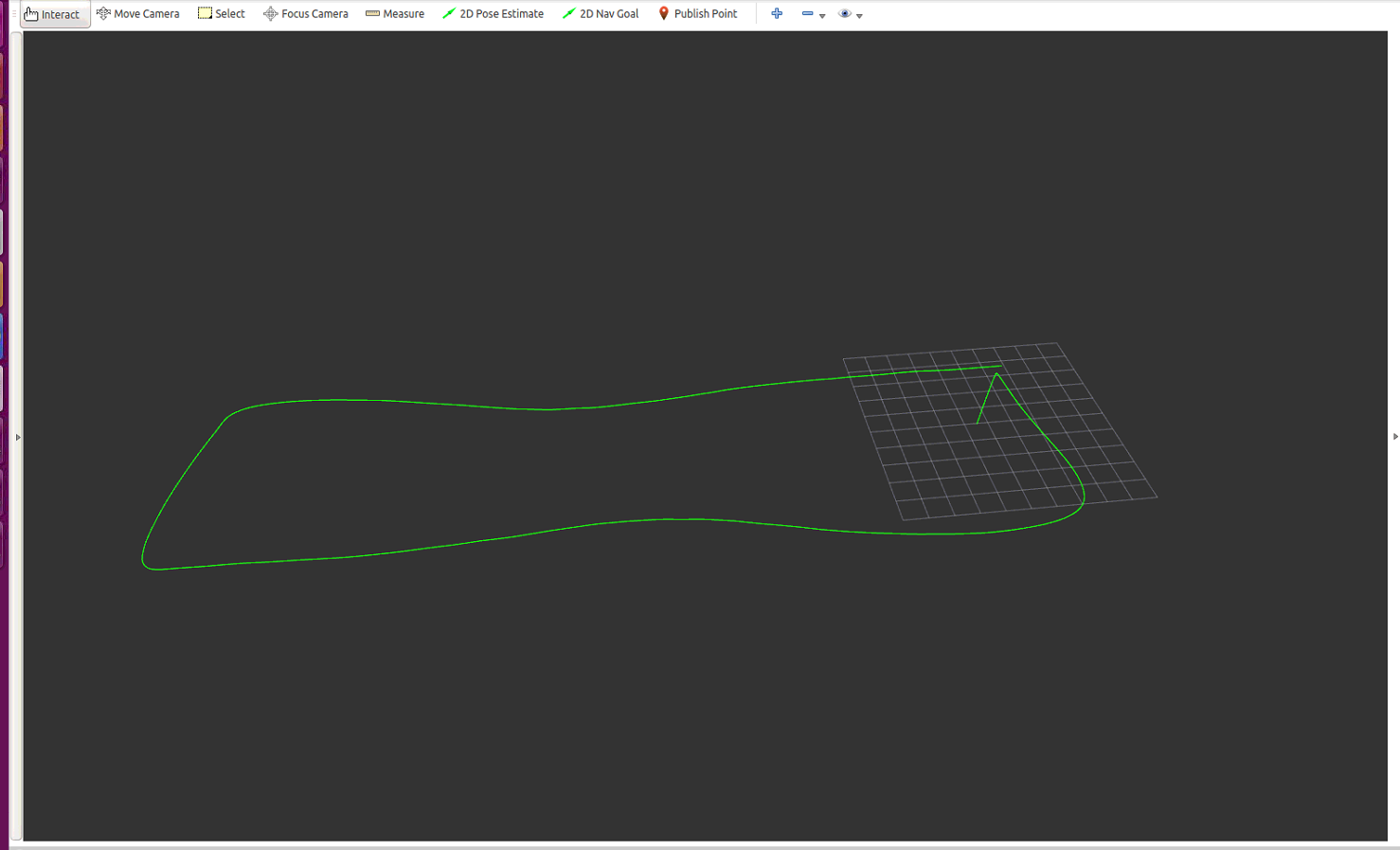
rviz显示
则在rviz里面能看到飞行轨迹了,我这里设置的mavros是飞行一个长方形的轨迹
3.5 说明:
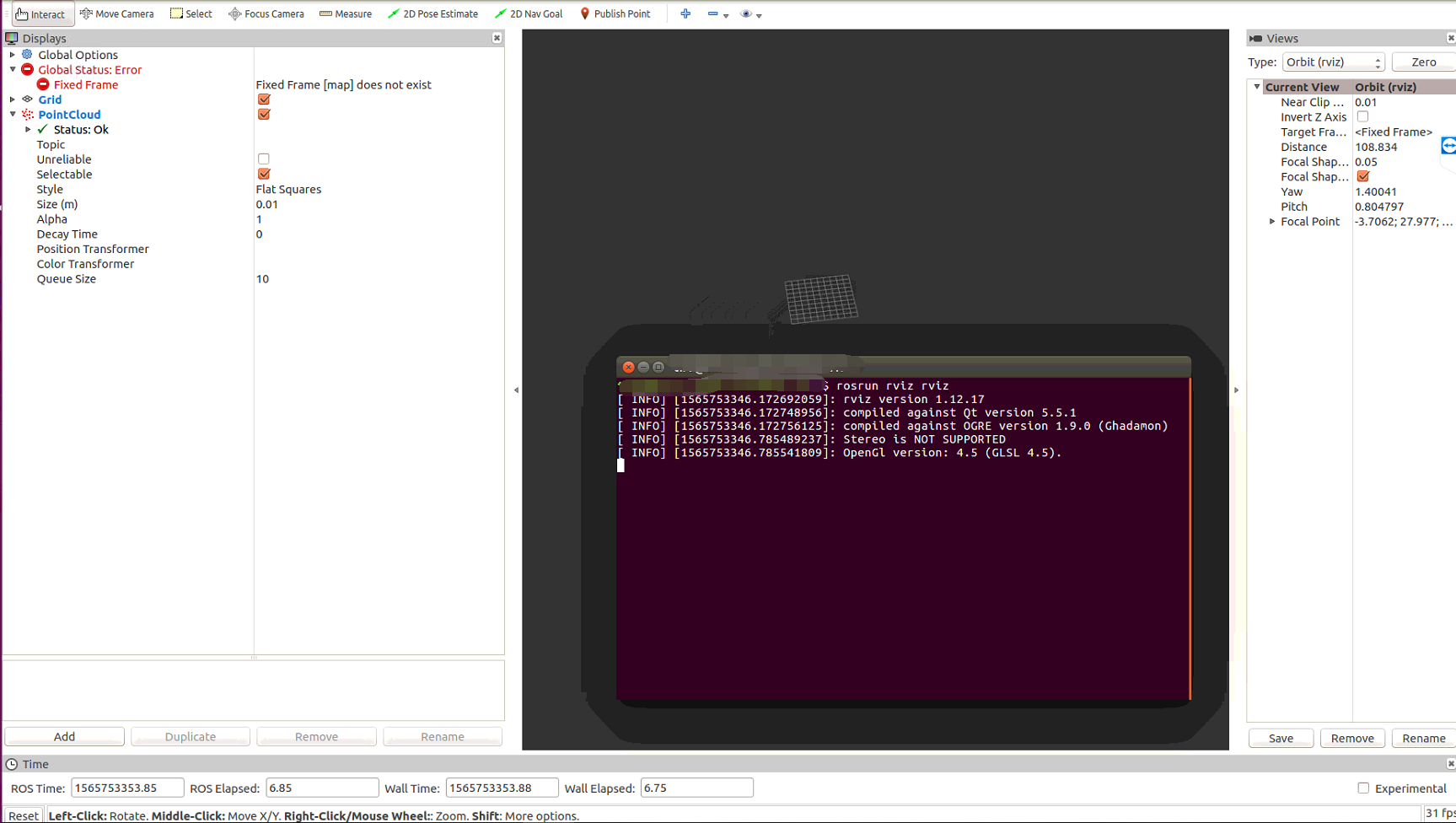
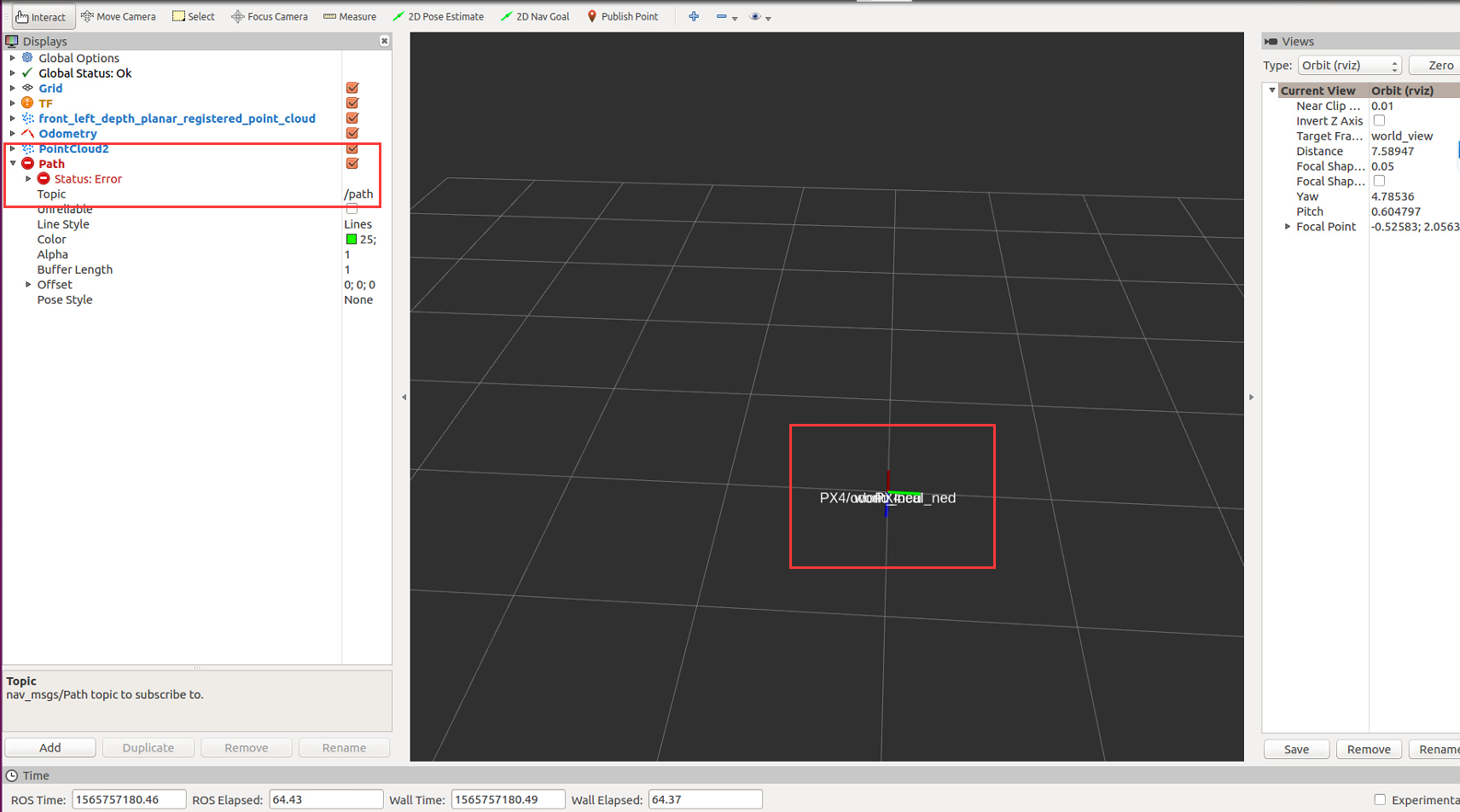
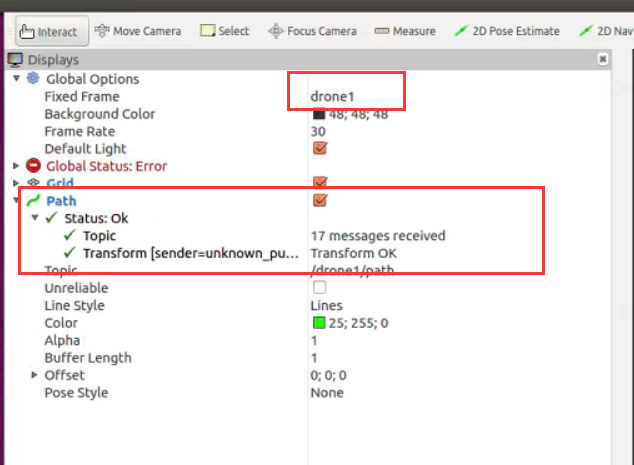
airsim里面也自带了一些rviz.launch文件,进行启动,我之前有测试过,启动launch之后,然后显示飞行轨迹时有报错,因此不采用这种方法,也没有去解决该错误,下图左边框出部分是报错信息,也没有成功显示飞行轨迹
顺带介绍一下,运行airsim里自带的这些launch文件的步骤,github详情
(1)升级cmake(要求cmake3.10版本以上)
注意一定不要先卸载cmake,即执行**sudo apt-get autoremove cmake**命令,执行该命令后,会把ros的一些相关依赖和mavros给卸载掉,若执行了则又需要重装ros
首先,去cmake官网手动下载cmake3.12.2,或者直接快捷跳到github下载地址,我这里采用命令下载
1 | wget proxychains4 https://github.com/Kitware/CMake/releases/download/v3.12.2/cmake-3.12.2-Linux-x86_64.tar.gz |
解压:
1 | tar zxvf cmake-3.12.2-Linux-x86_64.tar.gz |
创建软连接:
1 | sudo mv cmake-3.12.2-Linux-x86_64 /opt/cmake-3.12.2 |
最后,查看cmake版本
1 | cmake --version |
(2)编译(catkin build或catkin_make都可以)
1 | cd Airsim/ros |
(3)运行
只是为了显示rviz,运不运行airsim_node.launch都无所谓,但是添加了airsim_node.launch之后,rviz界面会多出一个东西,具体见下图
1 | source devel/setup.bash |
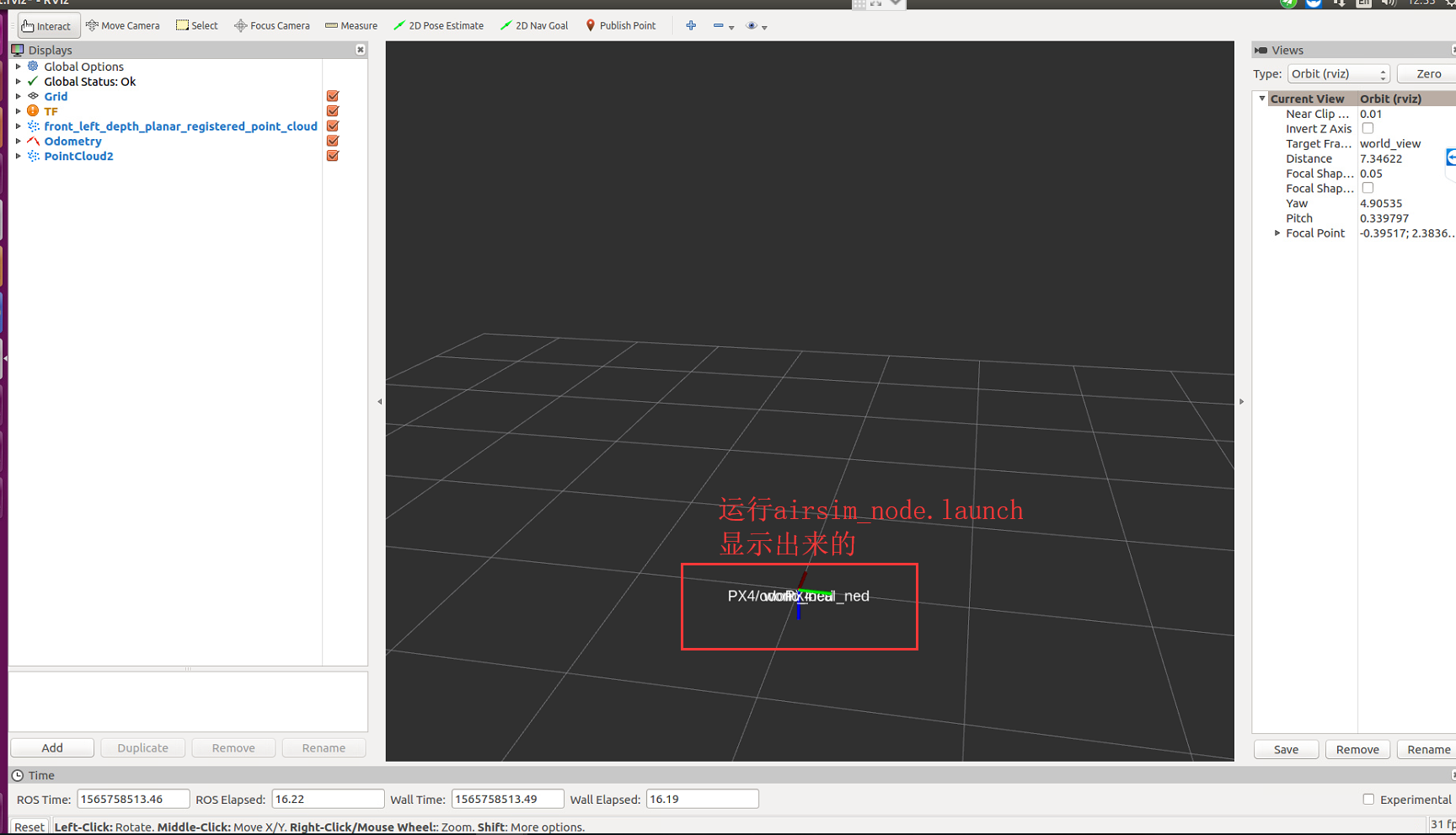
但是这个ros里面的airsim_node.launch,应该就发布了一些可以控制的命令topic,关于具体的控制,则没有去研究
四、rviz实时显示自定义ros控制飞行轨迹
这个关于自定义的ros控制,然后用rviz去显示器轨迹的时候,真的耗了我不少的功夫,原因在于网上的教程或说明更多的是教你如何写代码,并且用的是别人创建好的ros包,而且没有去获取机器人的位置。关于自己定义的ros包,没有什么说明。总之与我所面临的问题不太一样,后来经过测试,终于发现了其问题所在。
由于对ros和rviz不太熟,甚至最开始一度觉得自定义的ros,需要发布tf信息即可。而我的ros发布的消息并没有tf。直接说问题吧
原来的mavros控制下,其rviz相关代码如下,然后在rviz里面输入发布的topic就可以了
1 | from geometry_msgs.msg import Pose, PoseStamped |
自定义ros的rviz显示,按照道理,和上面代码差不多,但有部分需要修改,最开始按照上面的代码运行后,在rviz里显示下面的错误(这个错误其实就是一直在提示map的Fixed Frame不对,不存在,在mavros是不需要这个地方的)
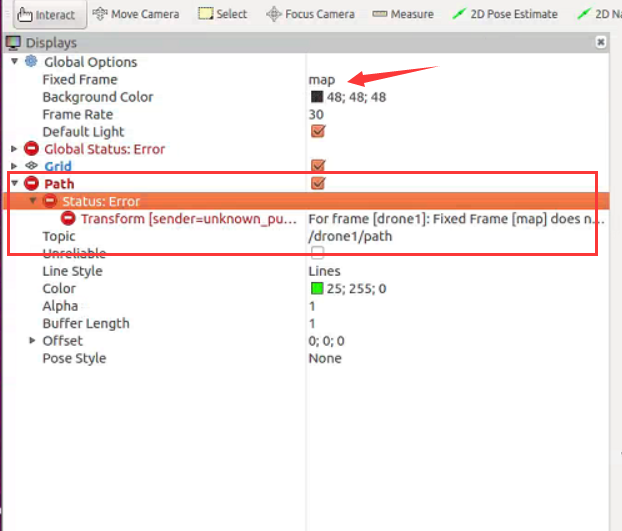
后来,将其代码进行修改,代码参考了玩转四旋翼无人机,但是并不需要进行tf广播,而且里面的tf广播好像还存在问题。修改后的代码如下:
1 | #!/usr/bin/env python |
然后,在rviz里面,将Fixed Frame修改为自定义的frame_id,这样就不会报错。
最后,显示自定义的ros控制的飞行轨迹
总结
关于mavros,现在理解的还不太多,但对其控制逻辑也有了一个基本的了解,其逻辑如下
(1) 解锁:首先完成解锁动作
(2) 起飞:控制起飞(从特定的经纬度处起飞,暂时还没有对起飞进行优化)
(3) 模式切换:起飞后,若要执行飞行命令,则需要将mode切换为OFFBOARD(并且在切换的过程中,必须要发布命令,否则切换无效)。
(4) 给定轨迹点:通过距离差值给速度,并且设定期望速度,最后对速度进行归一化。
(5) 悬停:到达目标点后,需要进行悬停操作,否则,之前的速度还会存在影响,即对速度进行清零操作。Mavros的悬停操作为切换模式,将mode切换为LOITER即可实现悬停。
(6) 降落:降落前,最好也先悬停一下,在进行降落。同样,和起飞类似,也是给定经纬度进行降落,不过降落好像并不是在特定位置降落。
若要实现多个轨迹点的操作,则在到达目标点并悬停后,重新给定一个轨迹点即可。