前言
在Airsim上做PX4的集成,并简单完成其算法验证
此配置是在Windows下配置,不是Ubuntu16
准备工具
- Pixhawk(我这里用的pixhawk如下图)
- 一根micro usb数据线

一、启动Airsim环境
关于Airsim在windows下的环境配置,请浏览初识Airsim(一)
1.1 打开Rolling.sln文件
双击运行Rolling.sln文件,则会默认打开VS
1.2 检查相关配置
确保配置为:DebugGame Editor + win64
1.3 运行工程项目
(1)可以先 点击 【生成】——>【重新生成解决方案】
(2)按F5,运行工程项目
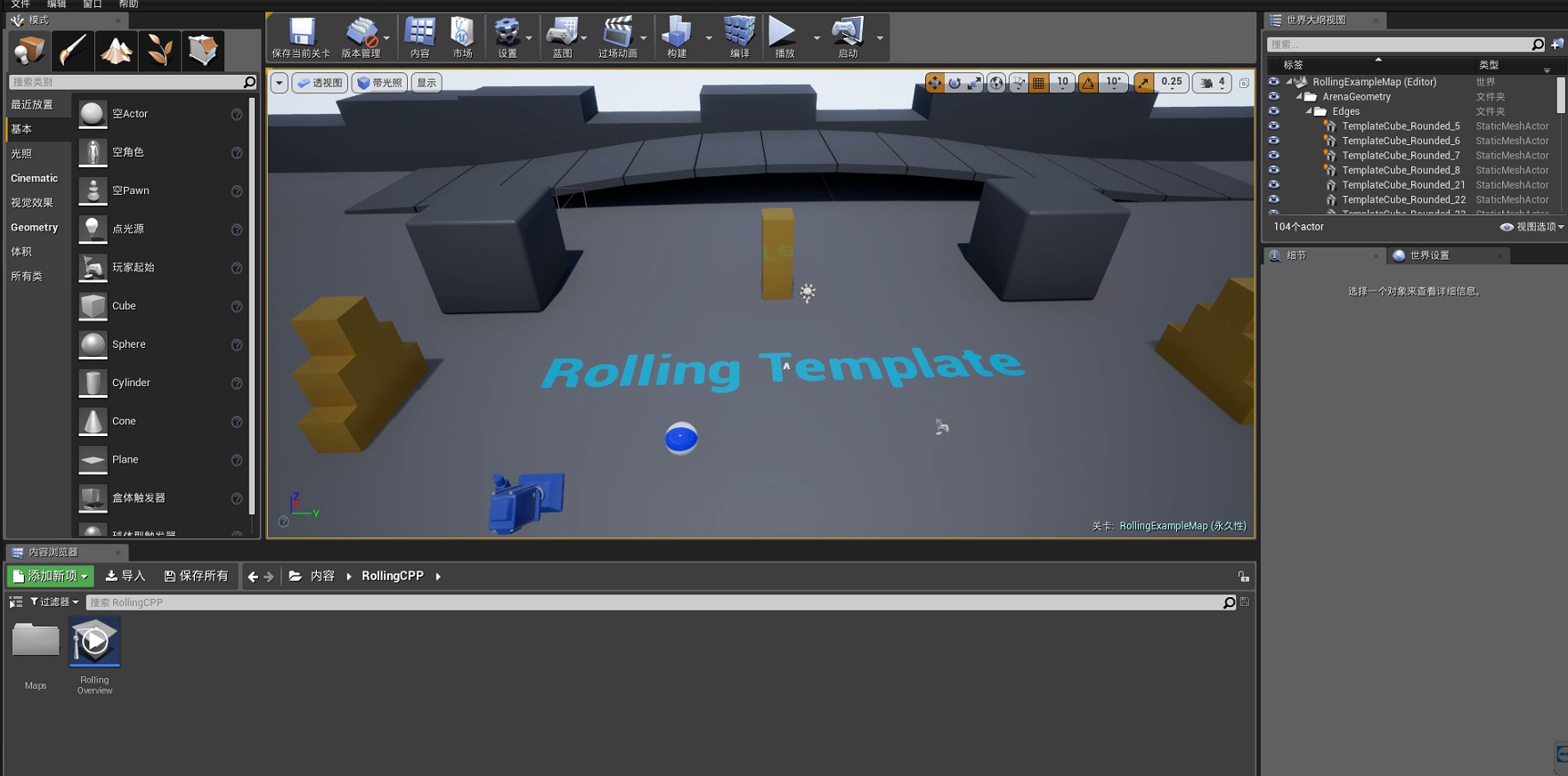
1.4 界面显示
做完前三步后,最终界面如下
二、配置settings.json
在Documents\Airsim文件夹下,找到settings.json文件,并修改为PX4配置
1 | { |
其中,UseSerial为true表示HIL模式,若为false,则为SITL模式
三、下载QGC
3.1 QGC下载
3.2 QGC安装
双击下载好的exe文件,完成QGC的安装
四、pixhawk配置
4.1 打开QGC
菜单栏搜索QGC,打开即可
4.2 连接pixhawk
将pixhawk通过USB线连接在测试电脑上
连接成功后会看到QGC上面已经连接上,而不是等待连接
4.3 刷新固件
4.3.1 下载最新固件
点击PX4下载Stable Release v1.9.2版本的px4_fmu-v2_default.px4
4.3.2 刷新px4_fmu-v2_default.px4固件
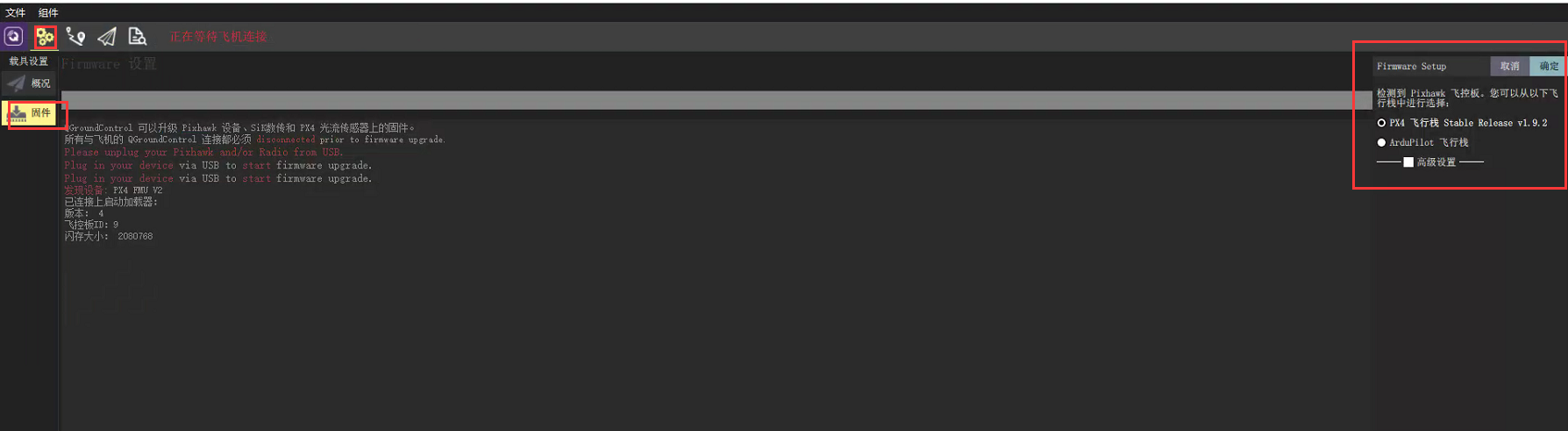
(1)找到设置,选择固件板块
(2)然后将pixhawk先拔掉,然后重新插上
(3)最后将会发现固件模块变成如下界面
(4)点击高级设置,选择自定义固件文件,然后点击确定
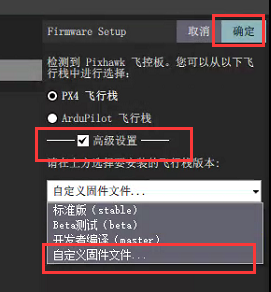
(5)在弹出来的框中,找到刚才下载的px4_fmu-v2_default.px4固件,进行升级更新
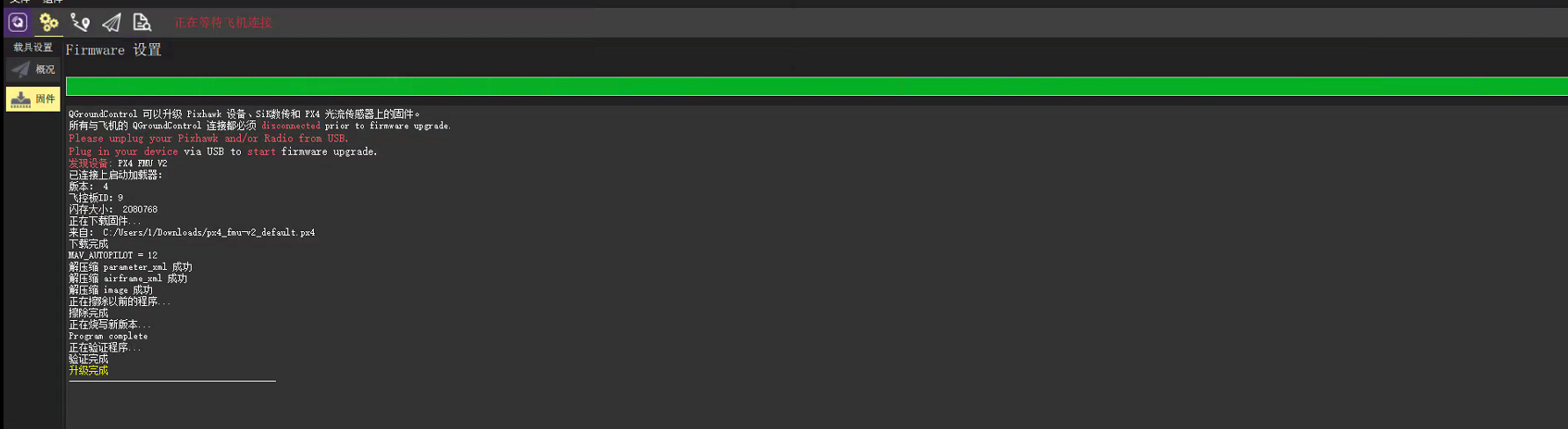
我这里没有检测出自动连接,因此重新手动连接一下即可
4.4 设置机身
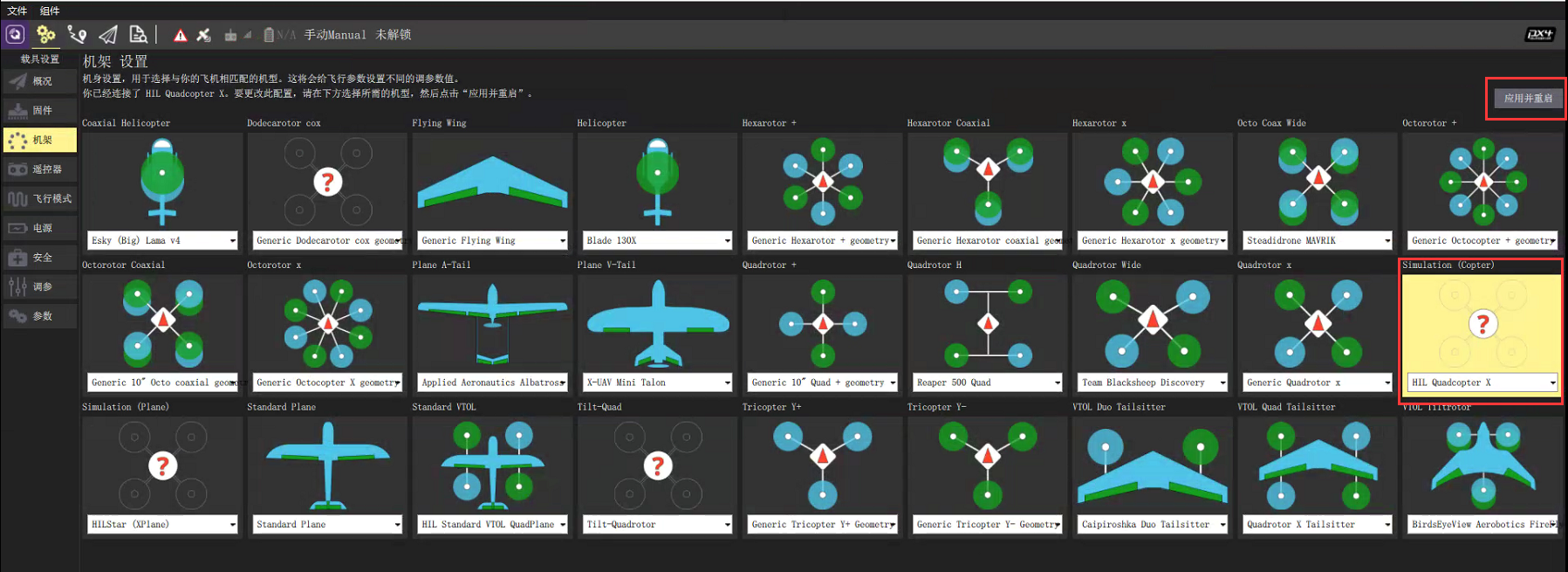
在设置中,找到机架板块,设置其机架为HIL Quadcopter X,并应用重启
我没有遥控器,因此在刚开始设置时,下面的遥控器、飞行模式和电源其实都是红色有问题的,我这里是设置过后的,所以看着没问题
4.5 修改参数值
在设置中,找到参数模块,搜索COM_RC,则会看到如下信息显示
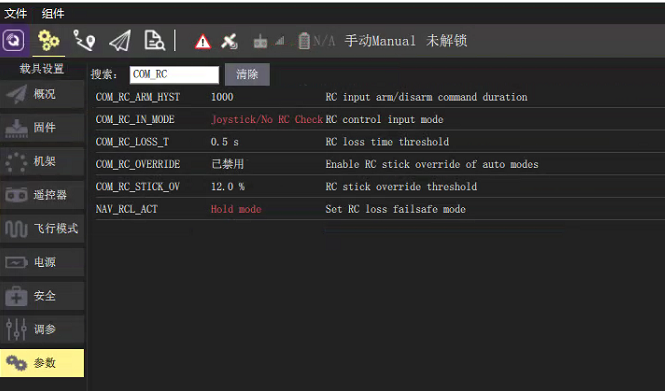
(1)将其中的COM_RC_IN_MODE修改为 Joystick/No RC Check,因为我没有使用遥控器,因此修改的该值
(2)将其中的NAV_RCL_ACT修改为Hold mode或者Disabled
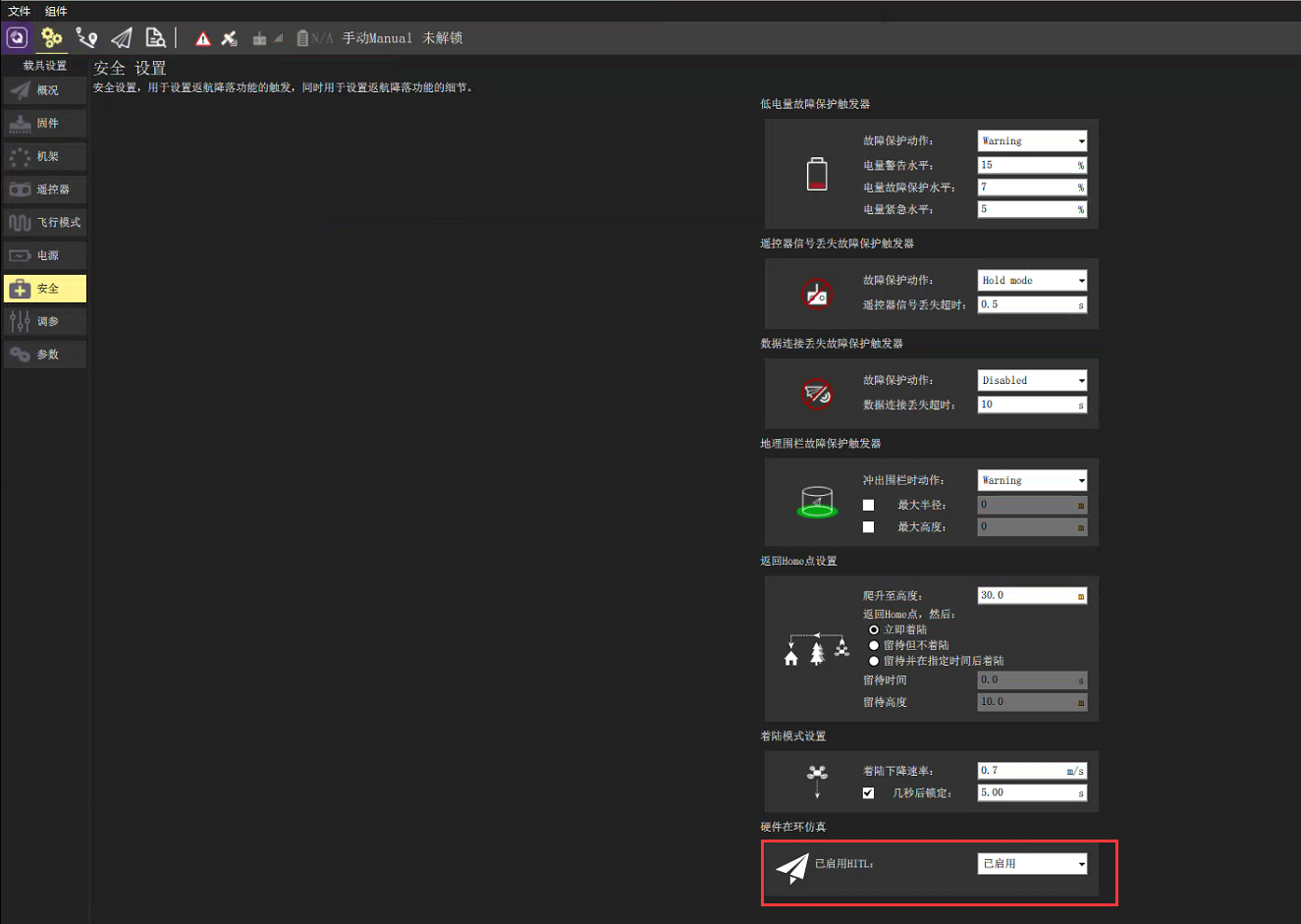
在设置中,找到安全模块,将HITL Enabled设置为Enabled,即启用HITL模式
在应用程序设置中,找到常规部分,取消选中除UDP外的所有框

五、测试pixhawk(SITL模式)
5.1 加载Airsim
在UE4界面中,选择播放,加载出无人机,此时可以看到,PX4已经成功连接
运行后,最后按shift + f1组合键,这样可以切换到其他窗口去

5.2 QGC起飞降落测试
在QGC中,选择起飞,并滑动确认,最终能看到UE4中的drone已经成功起飞
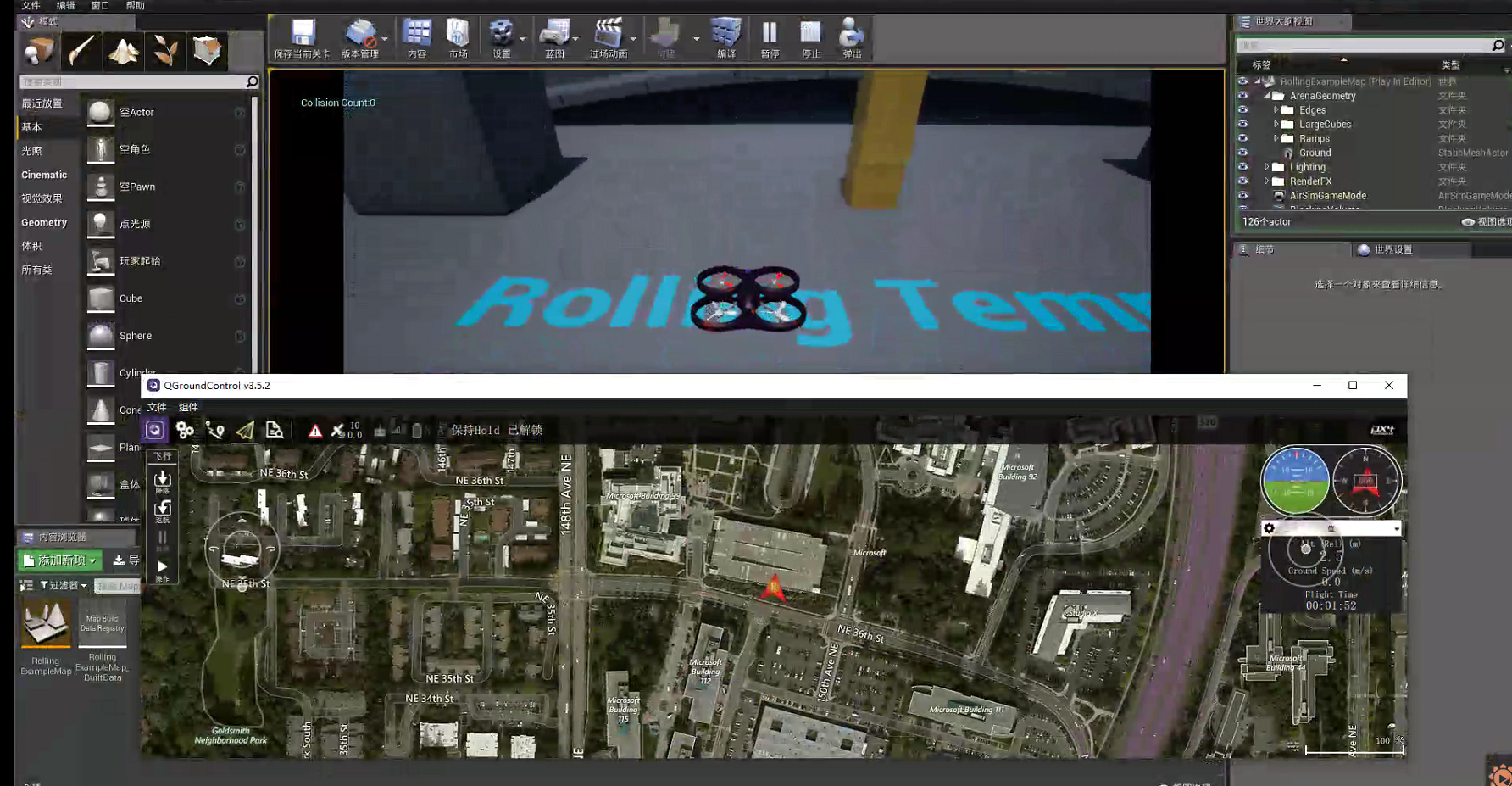
这里就不演示降落过程
5.3 QGC定点模式,虚拟摇杆测试
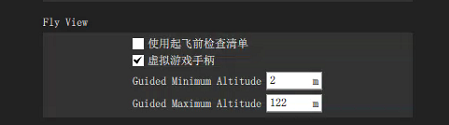
5.3.1 设置虚拟摇杆
在应用设置部分,找到常规模块,在其中的FlyView部分,在虚拟游戏手柄前的框勾选上
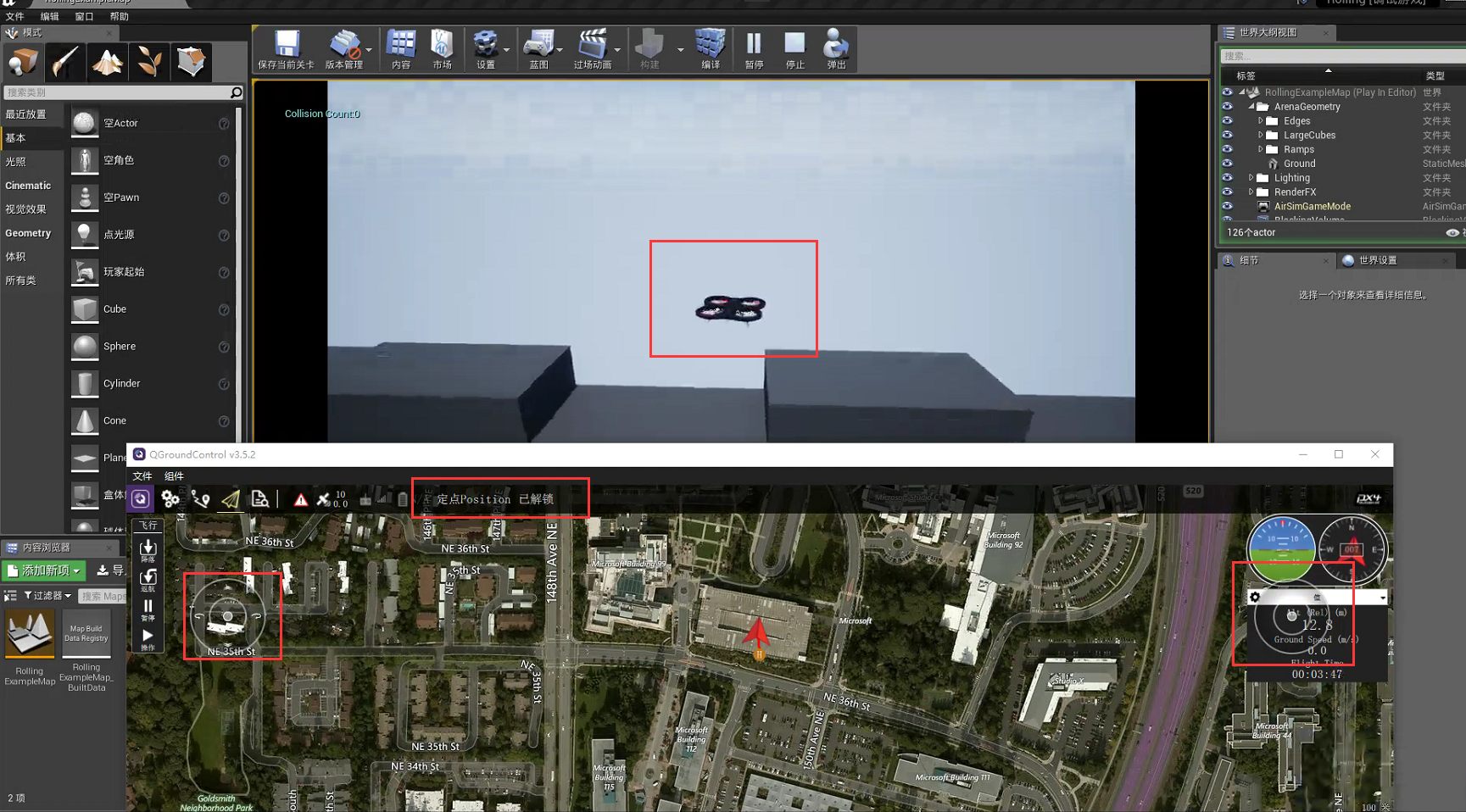
5.3.2 虚拟摇杆控制
首先将模式切换为定点Position,并且手动滑动却解锁。
然后使用左边的虚拟摇杆,完成上升、下降、转角等动作
右边的虚拟摇杆,完成前后左右控制等动作
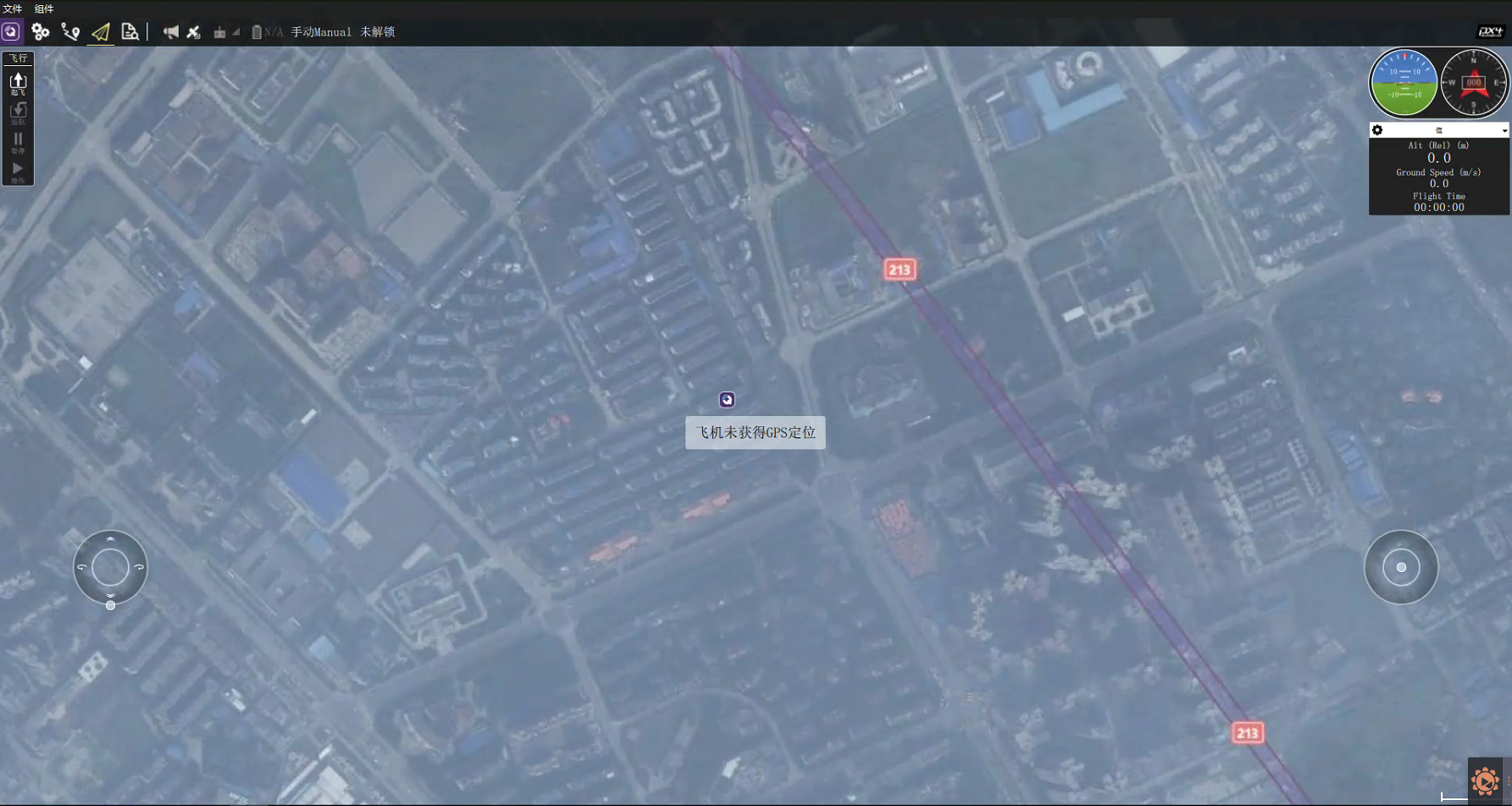
最终将杆保持在中间,使其悬停
下图中drone的位置,则是我使用虚拟摇杆控制飞行到当前位置的。
总结
关于在Windows下配置pixhawk,还相对来说比较好配置,但是在Linux下,还没有配置成功,明天再去配置最后一次。