前言
在Airsim上做PX4的集成,并简单完成其算法验证
此配置是在Ubuntu16下配置,和前一篇的系统不同,但是大部分配置细节还是相同的
准备工具
- Pixhawk(我这里用的pixhawk如下图)
- 一根micro usb数据线
一、启动Airsim环境
关于Airsim在Ubuntu16下的环境配置,请浏览初识Airsim(三)
1.1 启动UE4环境
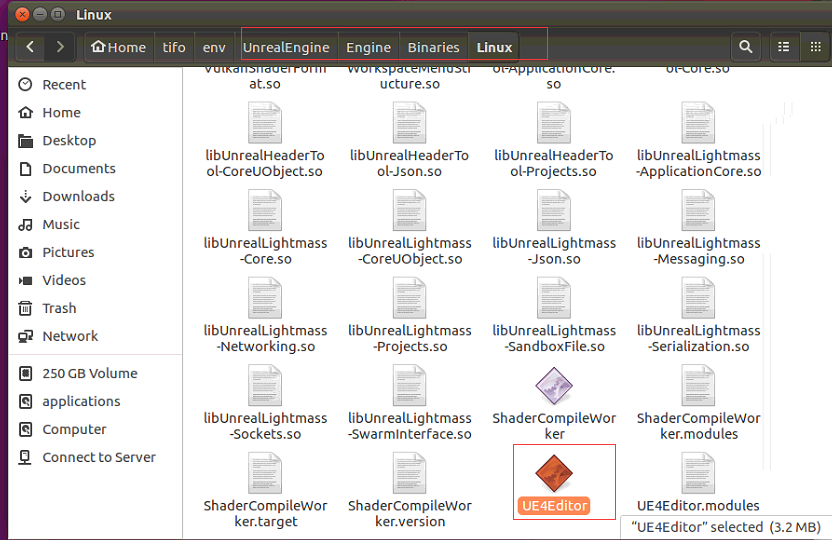
在Unreal Engine/Engine/Binaries/Linux/文件夹下,搜索UE4Editor,然后双击打开
或者在该文件目录下,执行./UE4Editor命令打开
这两种方式一样,但我还是喜欢双击打开
1.2 加载插件
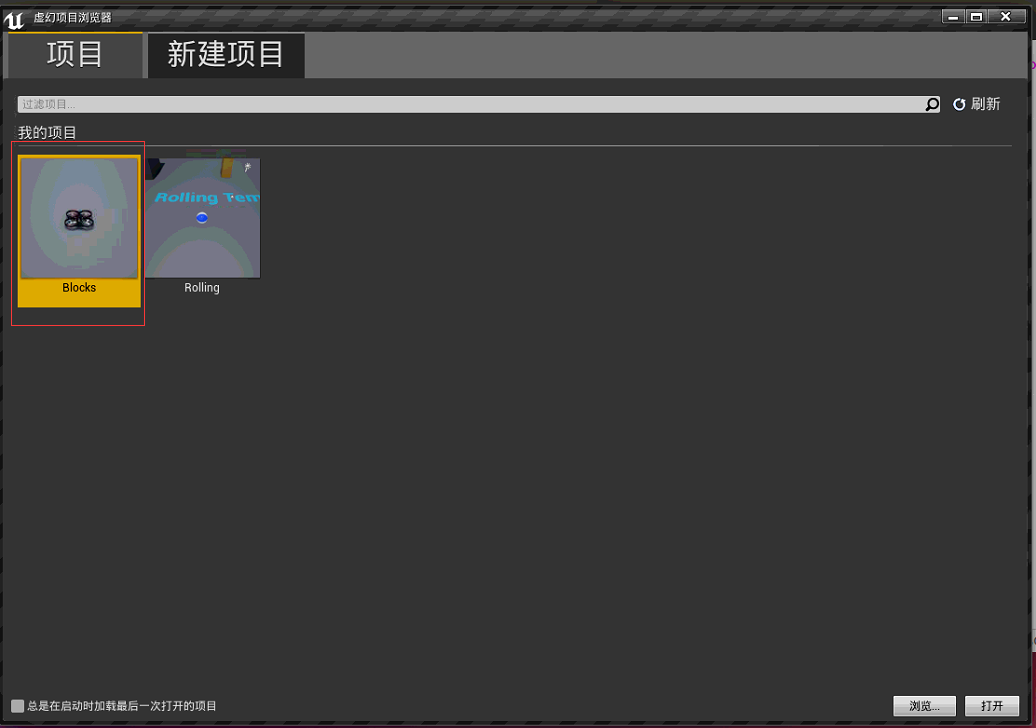
在弹出的界面中,选择Blocks插件,打开。这样通过其中的设置,就能加载出无人机
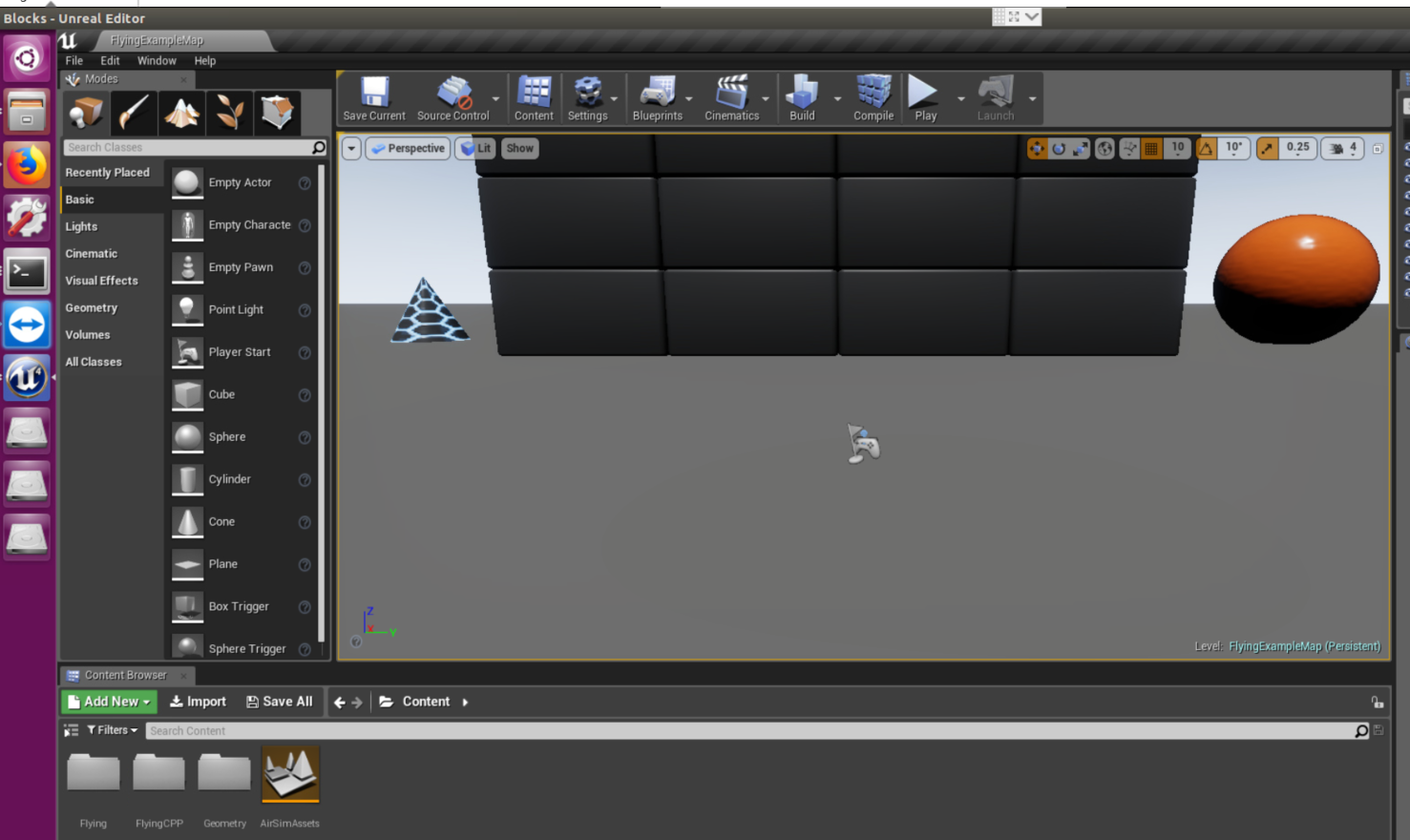
1.3 界面显示
加载出来后,先不要立刻点击Play,等后面的配置完成在进行点击
二、配置settings.json
在Documents\Airsim文件夹下,找到settings.json文件,并修改为PX4配置
1 | { |
三、QGC下载
3.1 QGC下载
下载QGC,请点击此处
3.2 修改权限
1 | cd ~/Downloads |
四、pixhawk配置
4.1 打开QGC
1 | cd ~/Downloads |
4.2 连接pixhawk
将pixhawk通过USB线连接在测试电脑上
通常将pixhawk连接在电脑上后,打开QGC,QGC会自动连接上飞机。如果没有自动连接上,也可以采用手动连接的方式,手动连接操作如下:
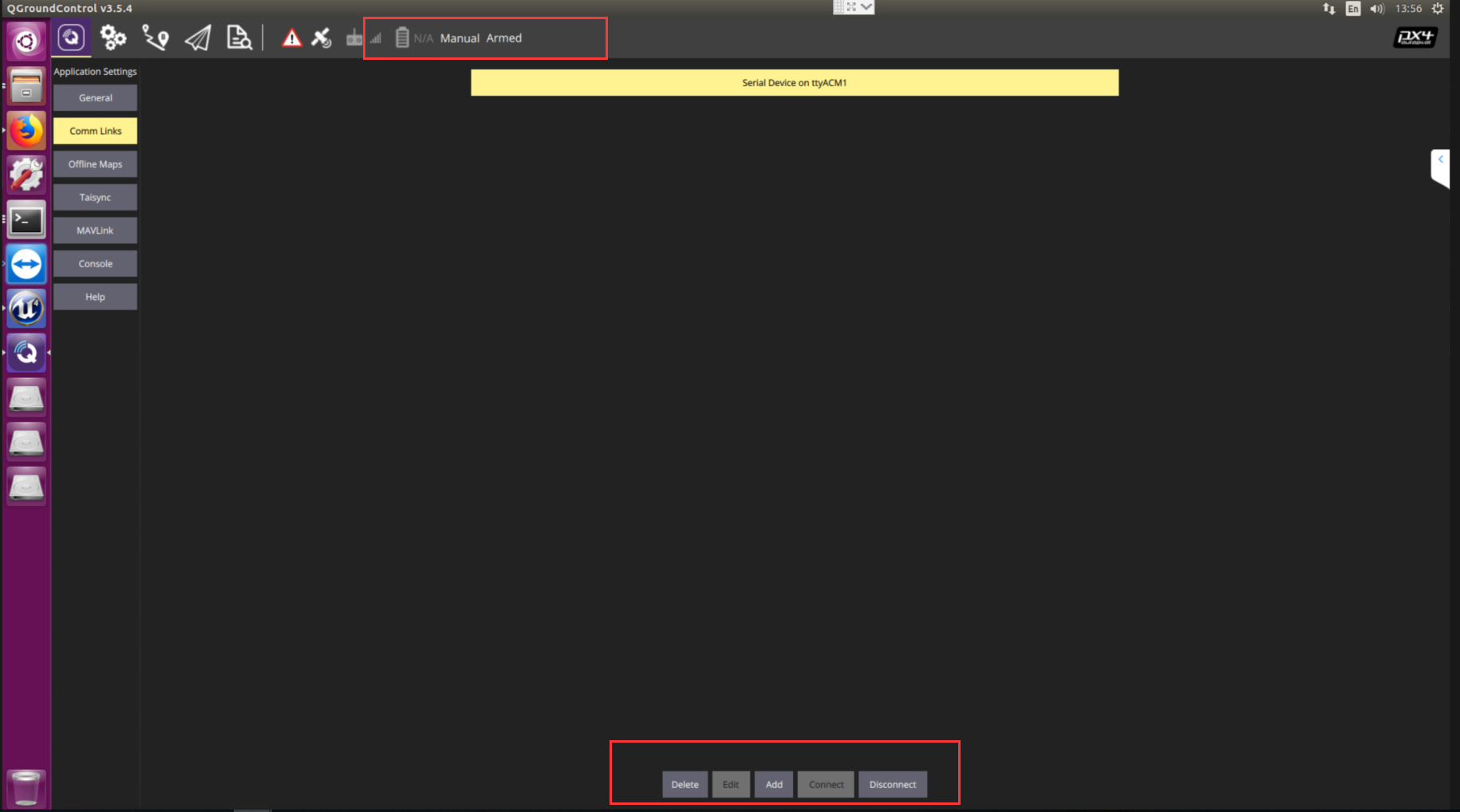
在应用设置中找到Comm Links,点击正下方的Add进行添加,然后在新弹出的添加界面中,设置合适的端口和波特率,例如我这里的端口为ttyACM1,波特率设置为115200。
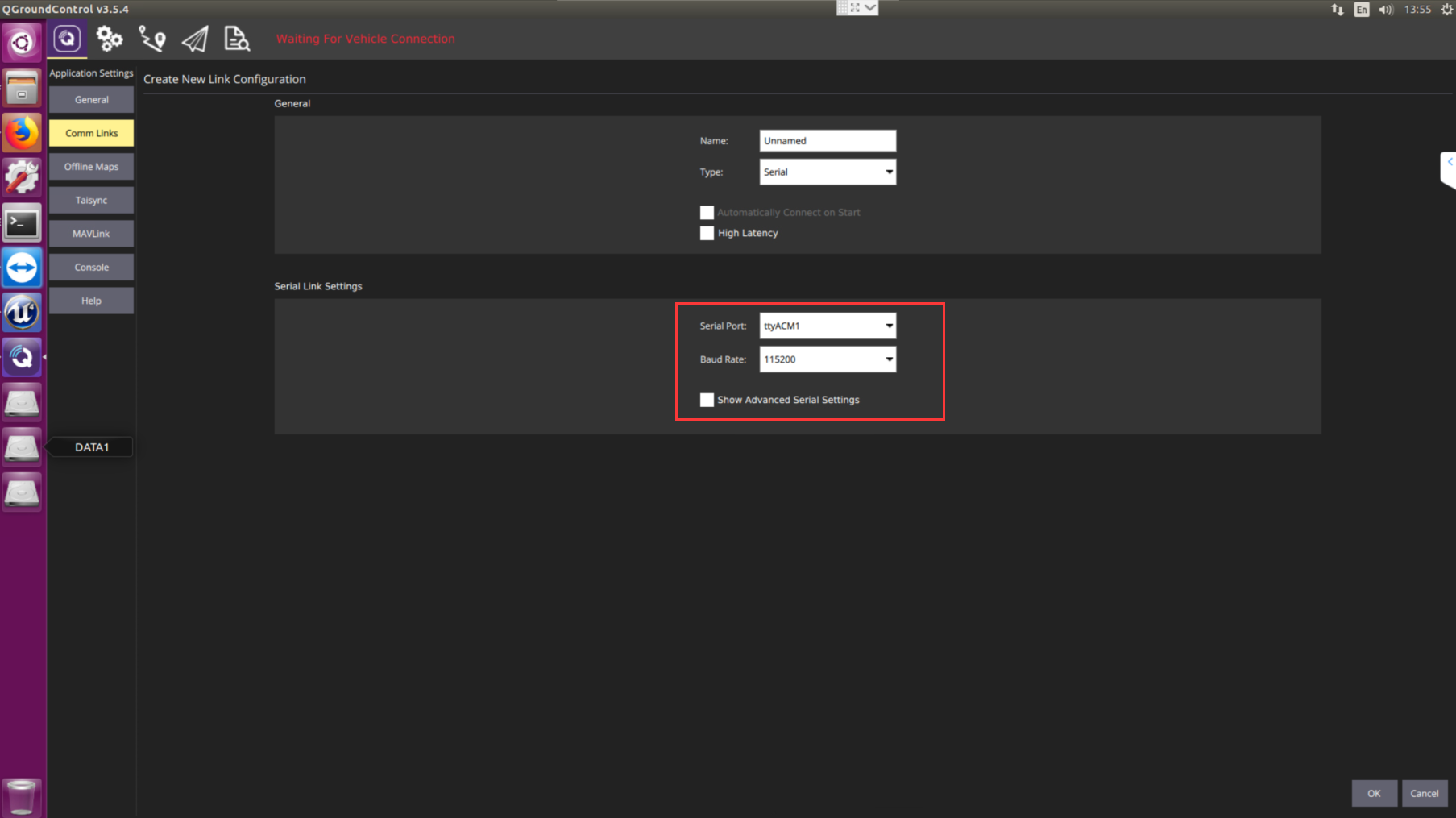
设置后,点击正下方的Connect,进行连接,连接成功后,如下图所示
4.3 刷新固件
4.3.1 下载最新PX4固件
点击PX4下载Stable Release v1.9.2版本的px4_fmu-v2_default.px4
4.3.2 刷新px4_fmu-v2_default.px4固件
这下面的步骤,是完全和Windows下一样,该小节下面的图片全部都来自于上一篇windows下的图片,Ubuntu中是一模一样的,只是Ubuntu中QGC是英文显示,Windows下是中文显示,其他没有区别。
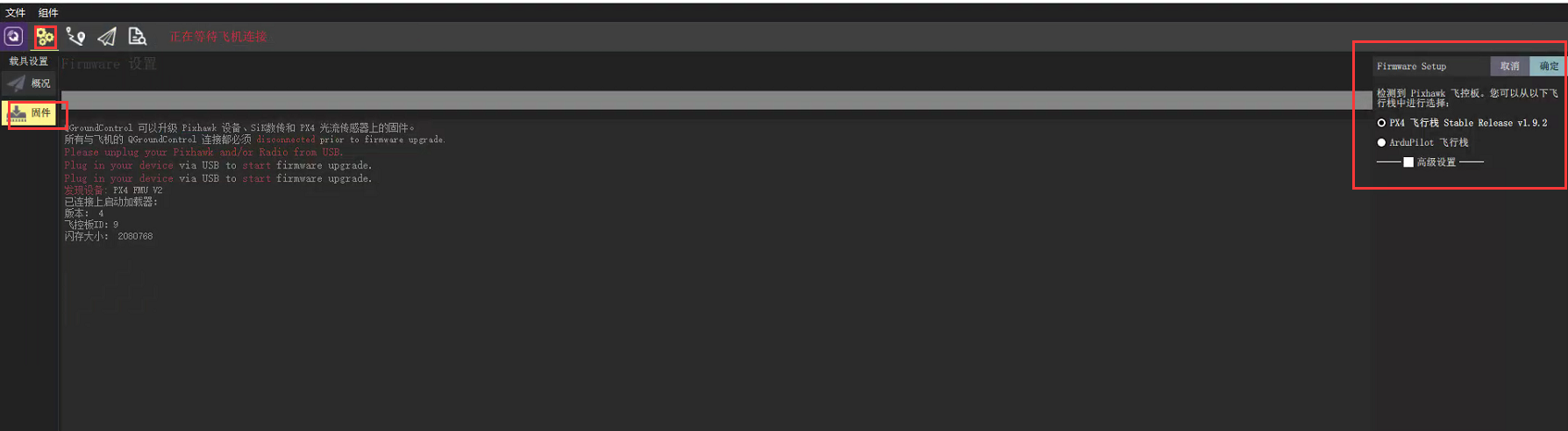
(1)找到设置,选择固件板块
(2)然后将pixhawk先拔掉,然后重新插上
(3)最后将会发现固件模块变成如下界面
(4)点击高级设置,选择自定义固件文件,然后点击确定
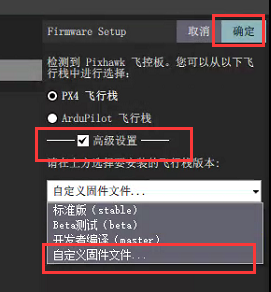
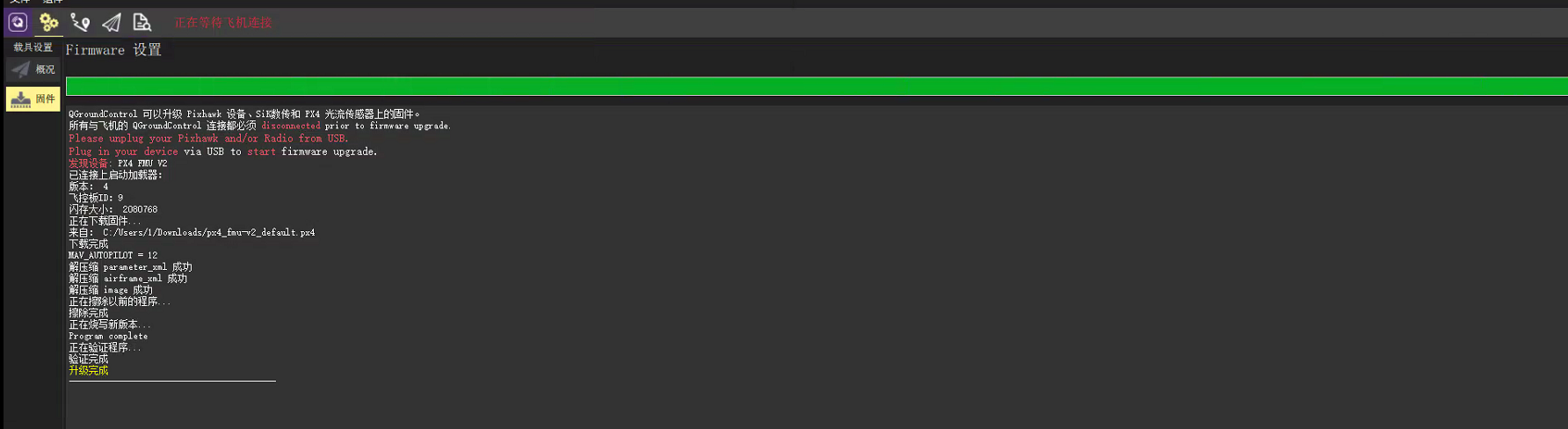
(5)在弹出来的框中,找到刚才下载的px4_fmu-v2_default.px4固件,进行升级更新
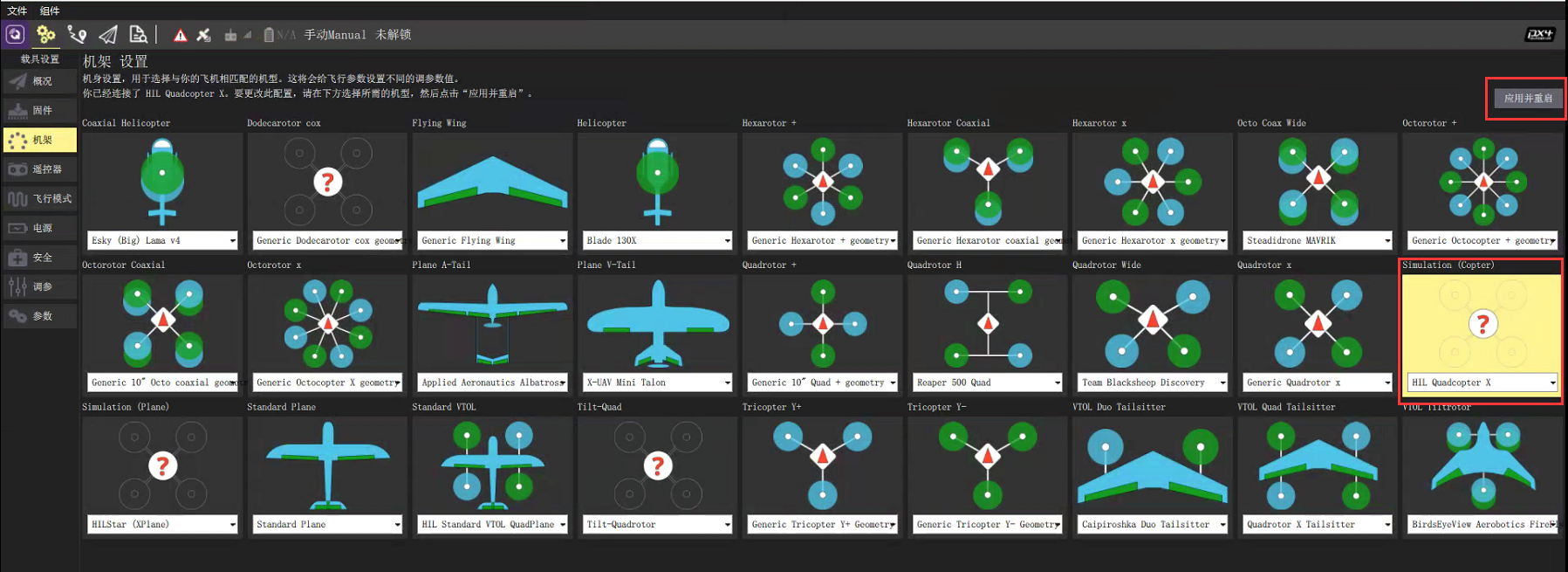
4.4 设置机身
在设置中,找到机架板块,设置其机架为HIL Quadcopter X,并应用重启
我没有遥控器,因此在刚开始设置时,下面的遥控器、飞行模式和电源其实都是红色有问题的,我这里是设置过后的,所以看着没问题
4.5 修改参数值
在设置中,找到参数模块,搜索COM_RC,则会看到如下信息显示
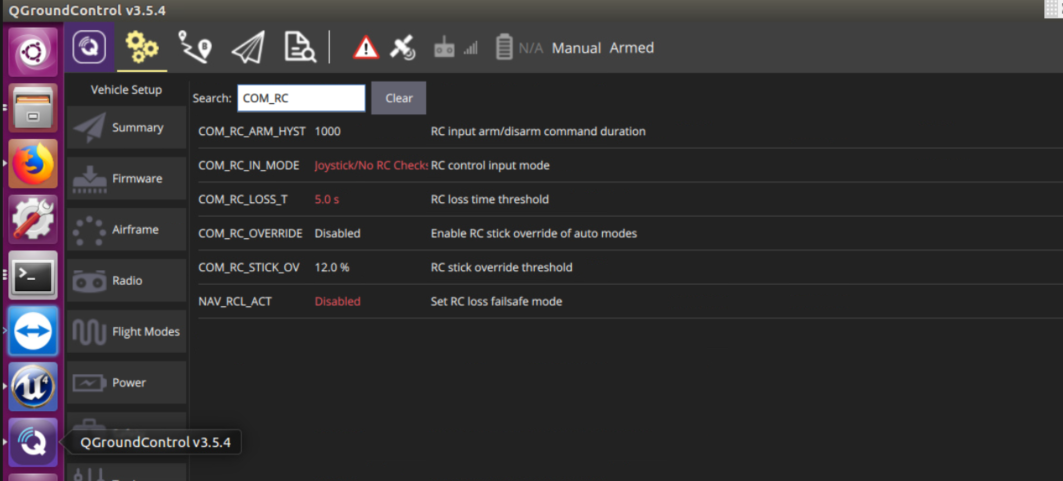
(1)将其中的COM_RC_IN_MODE修改为 Joystick/No RC Check,因为我没有使用遥控器,因此修改的该值
(2)将其中的NAV_RCL_ACT修改为Hold mode或者Disabled
(3)将其中的COM_RC_LOSS_T修改为5s(非必须)
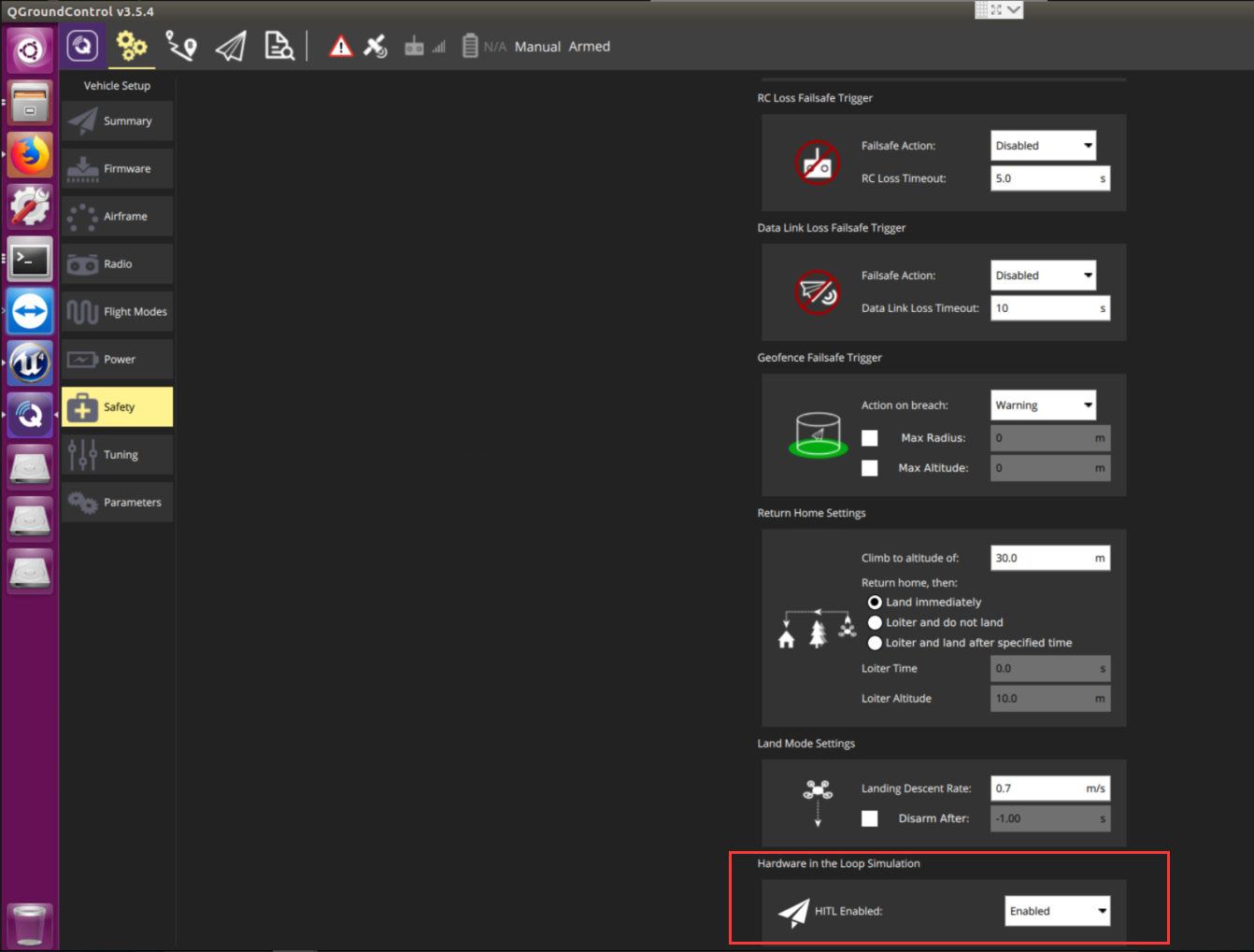
其实,这这里可以看出,我修改过的值是标红了的在设置中,找到安全模块,将HITL Enabled设置为Enabled,即启用HITL模式
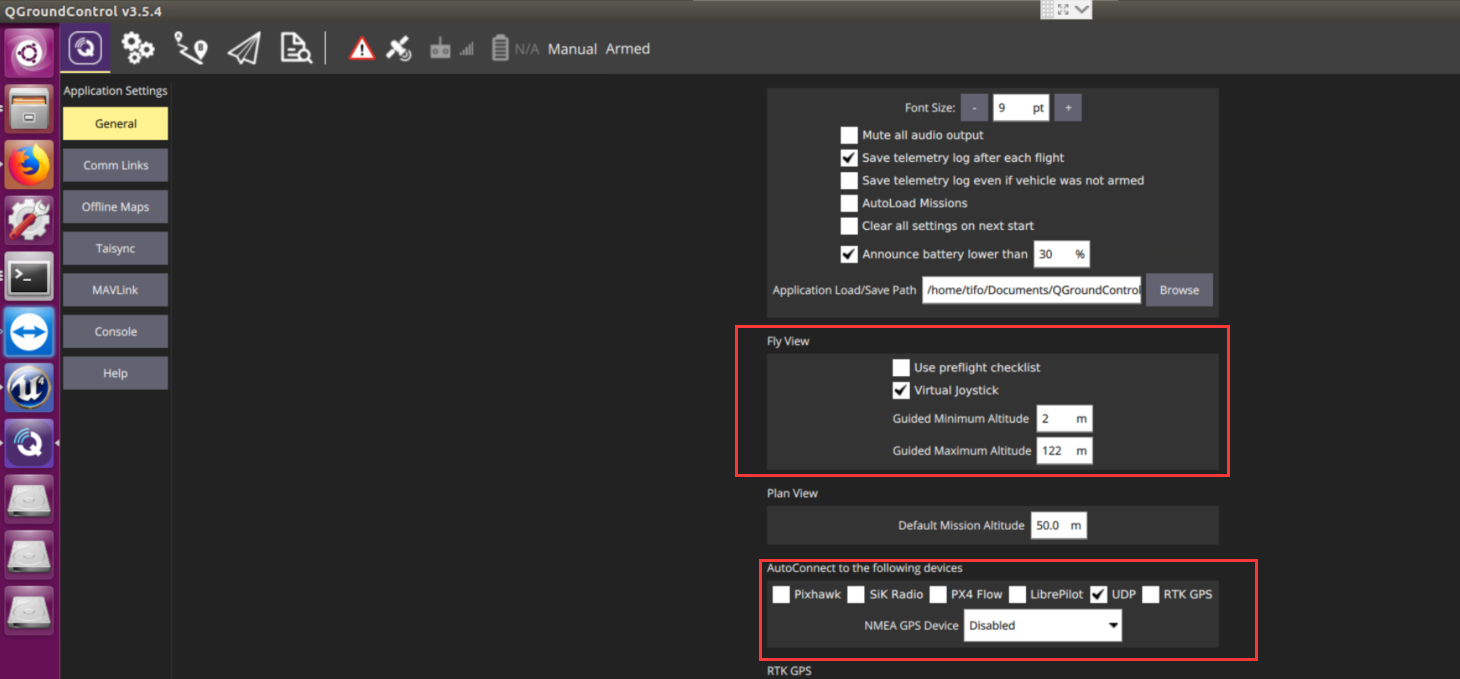
在应用程序设置中,找到常规部分,取消选中除UDP外的所有框
并且开启虚拟摇杆
五、测试pixhawk(HITL模式)
5.1 QGC连接Pixhawk
首先要确保QGC和Pixhawk是连接状态,如4.2节中连接成功后的图片
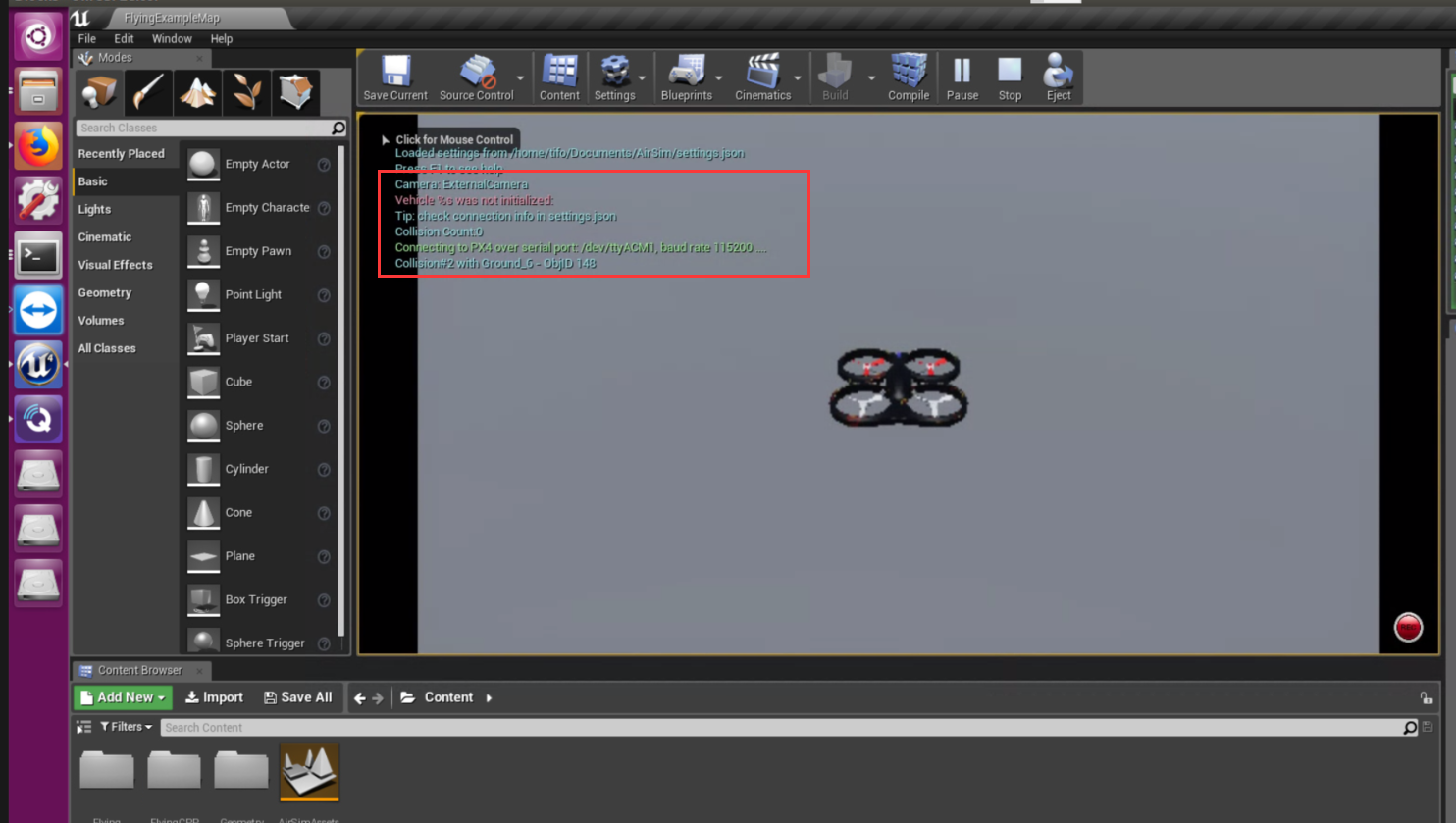
5.2 UE4中加载Airsim
此时会发现,UE4中的Airsim无人机没有初始化,图片中的红色提示部分
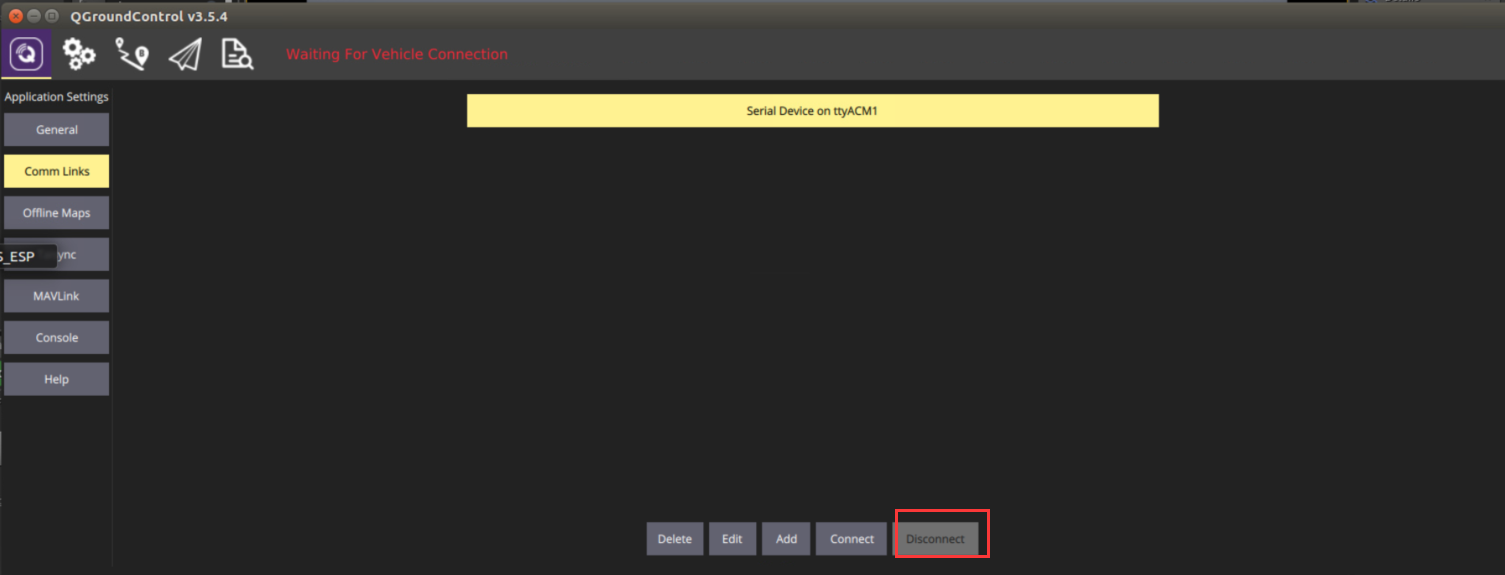
5.3 断开QGC连接
将QGC中的pixhawk连接,手动断开
5.4 重启UE4的Airsim环境
并不是要关掉UE4,重新打开,而是在当前UE4中按ESC键
(1)在UE4环境中,按Esc键,退出
可以看到UE4中,重新回到Play状态,并且QGC也没有连接上
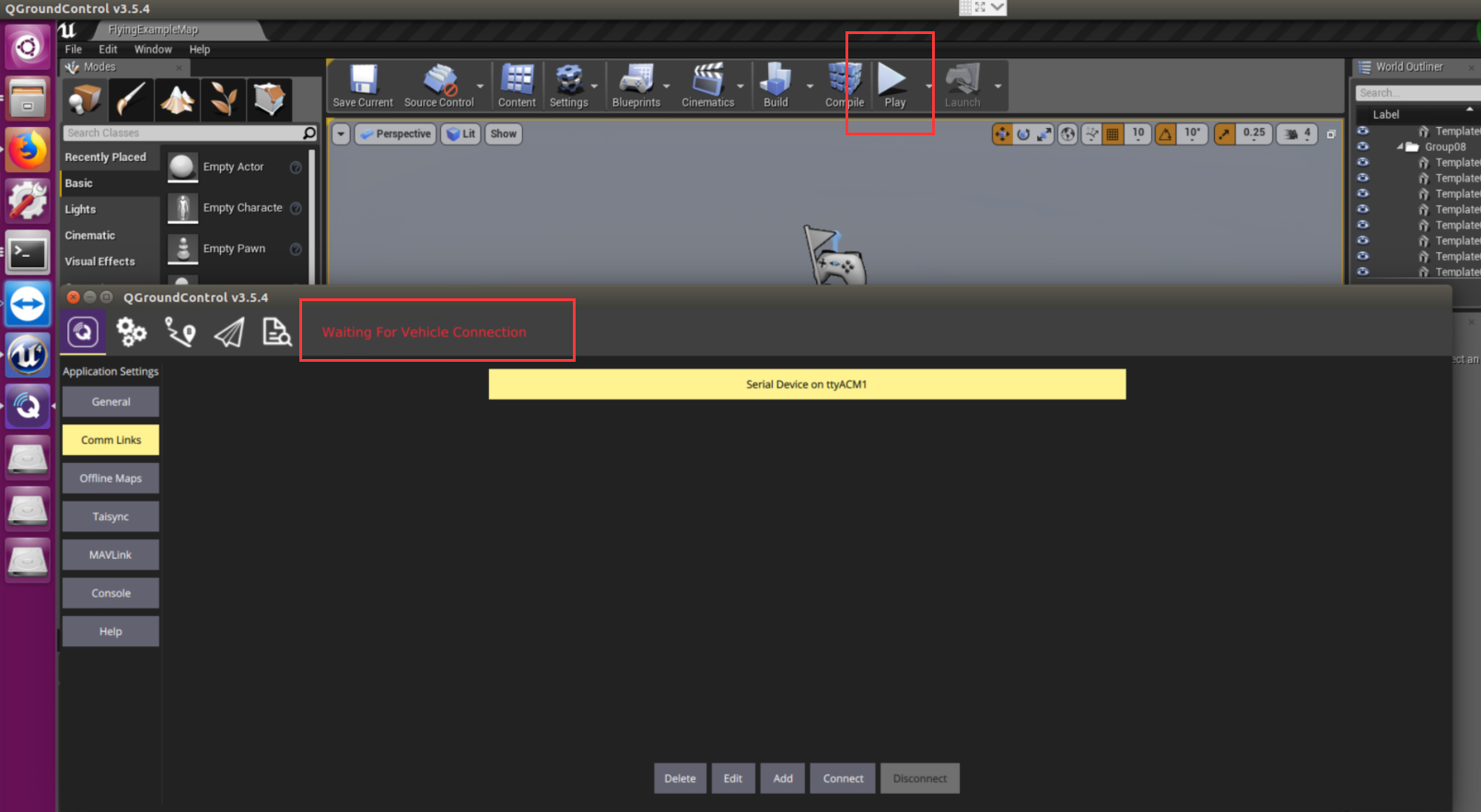
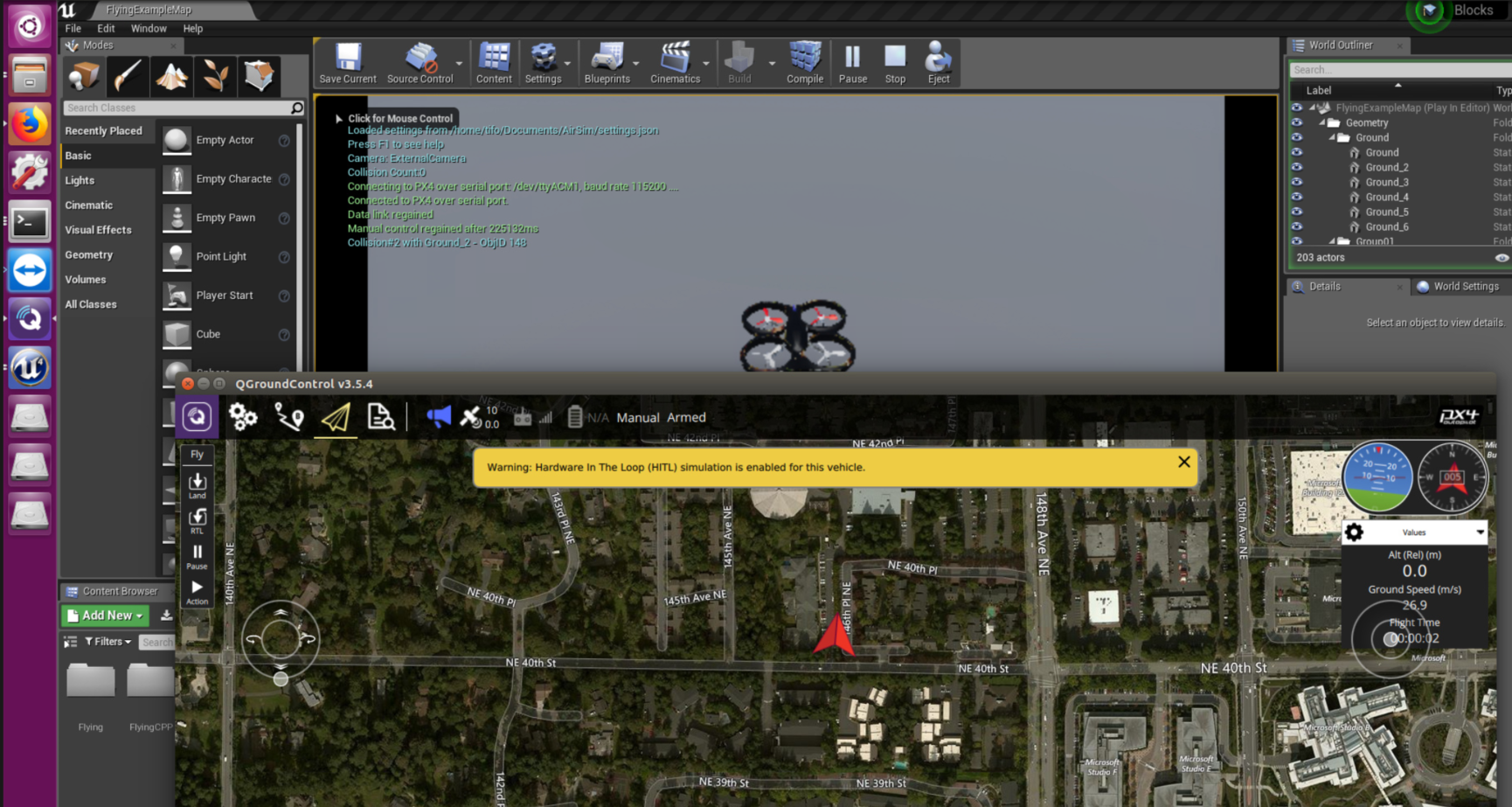
(2)点击Play,重新加载Airsim环境
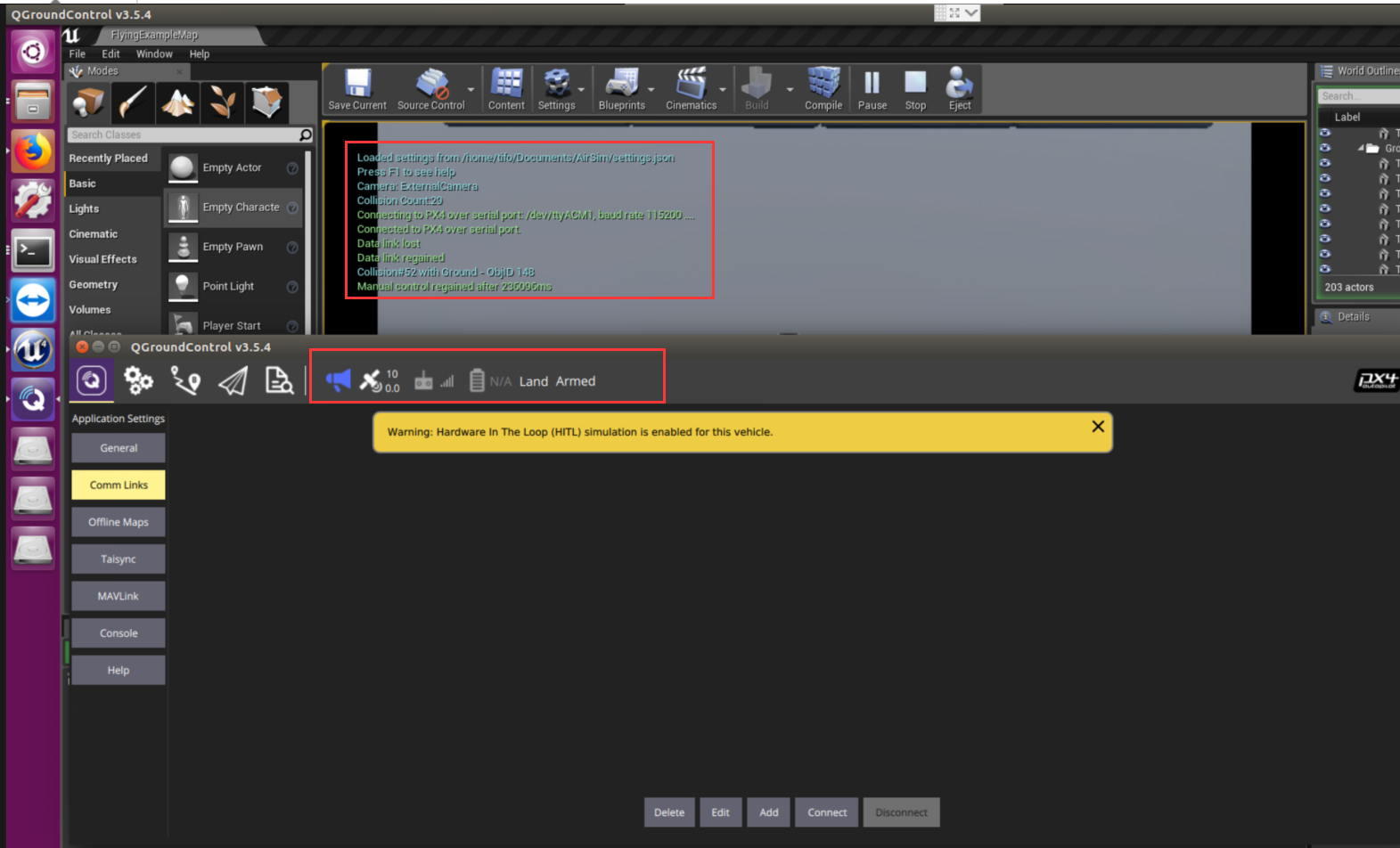
此时,将会看到UE4环境中,参数已经初始化,并且也会发现QGC中的Pixhawk也已经自动连接上
5.5 QGC起飞降落测试
在控制的模式中,发现起飞降落并没有效果(暂时还不太明白),但是也会发现终于没有那令人苦闷的 NO GPS的相关提示错误了
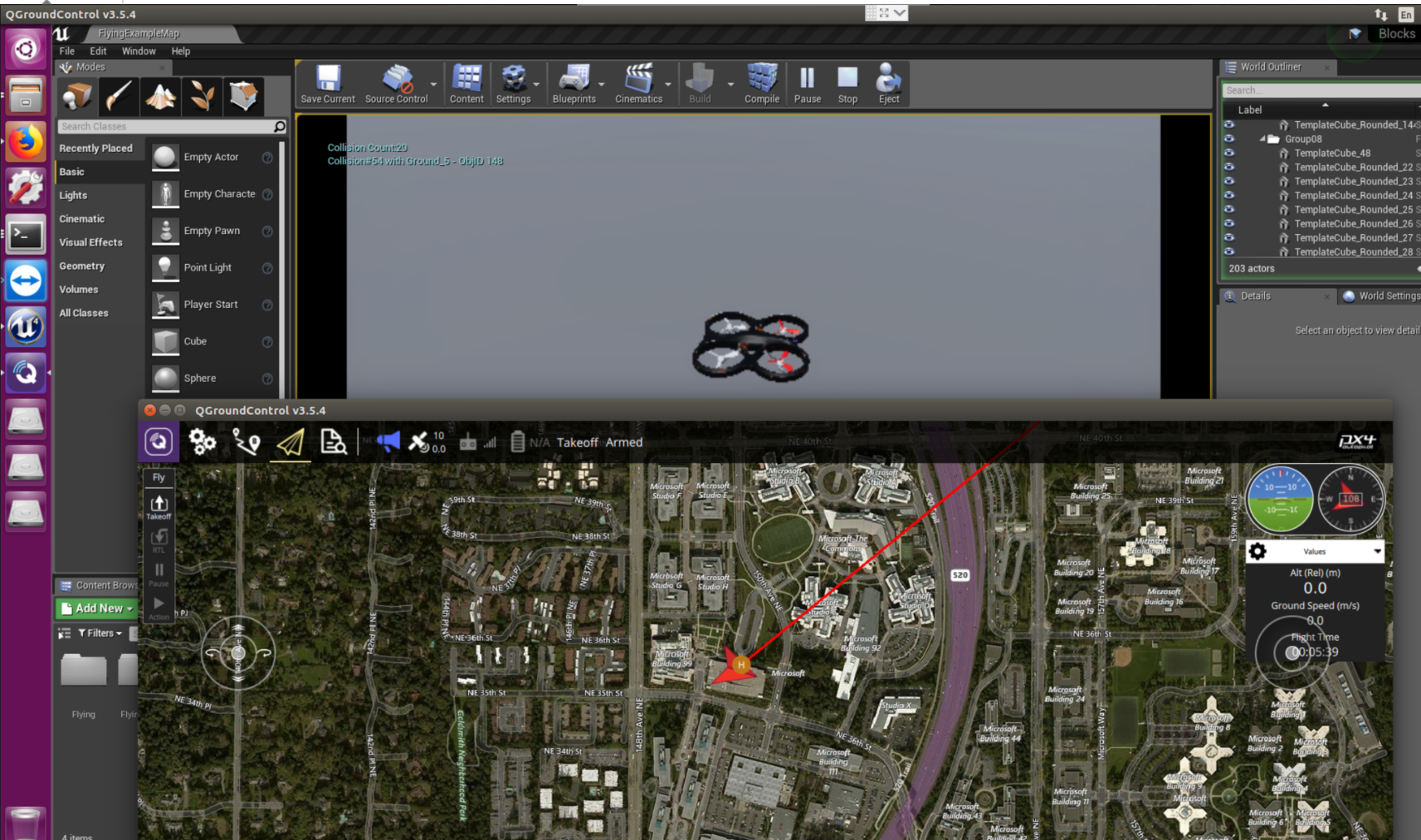
点击起飞后,发现并没有无人机没有成功起飞(下面肿的红色路径是我之前飞行过的,还没有消除,并且也会发现,QGC上面显示的是Takeoff Armed)
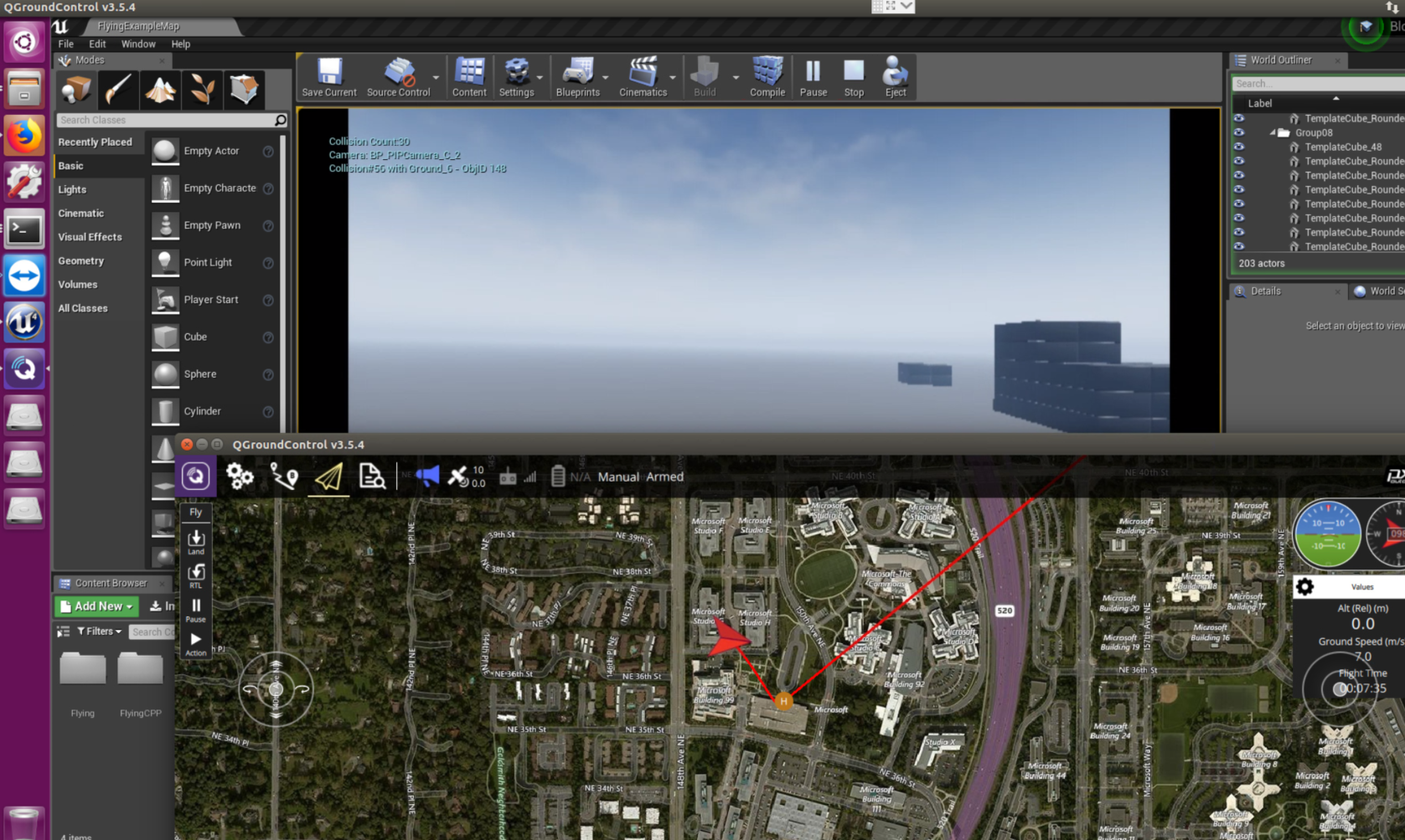
将Takeoff修改为Manual模式,会发现无人机已经成功起飞,而且一直都没有停下来(下图中QGC的模式已经变换为Manual,不清楚为什么切换一下,才能成功飞起,并且还是乱飞的情况,UE4中显示的是无人机的第一视角,而且和上图相比,多了一条红色路线,该路线则是切换Manual模式后的起飞路线)
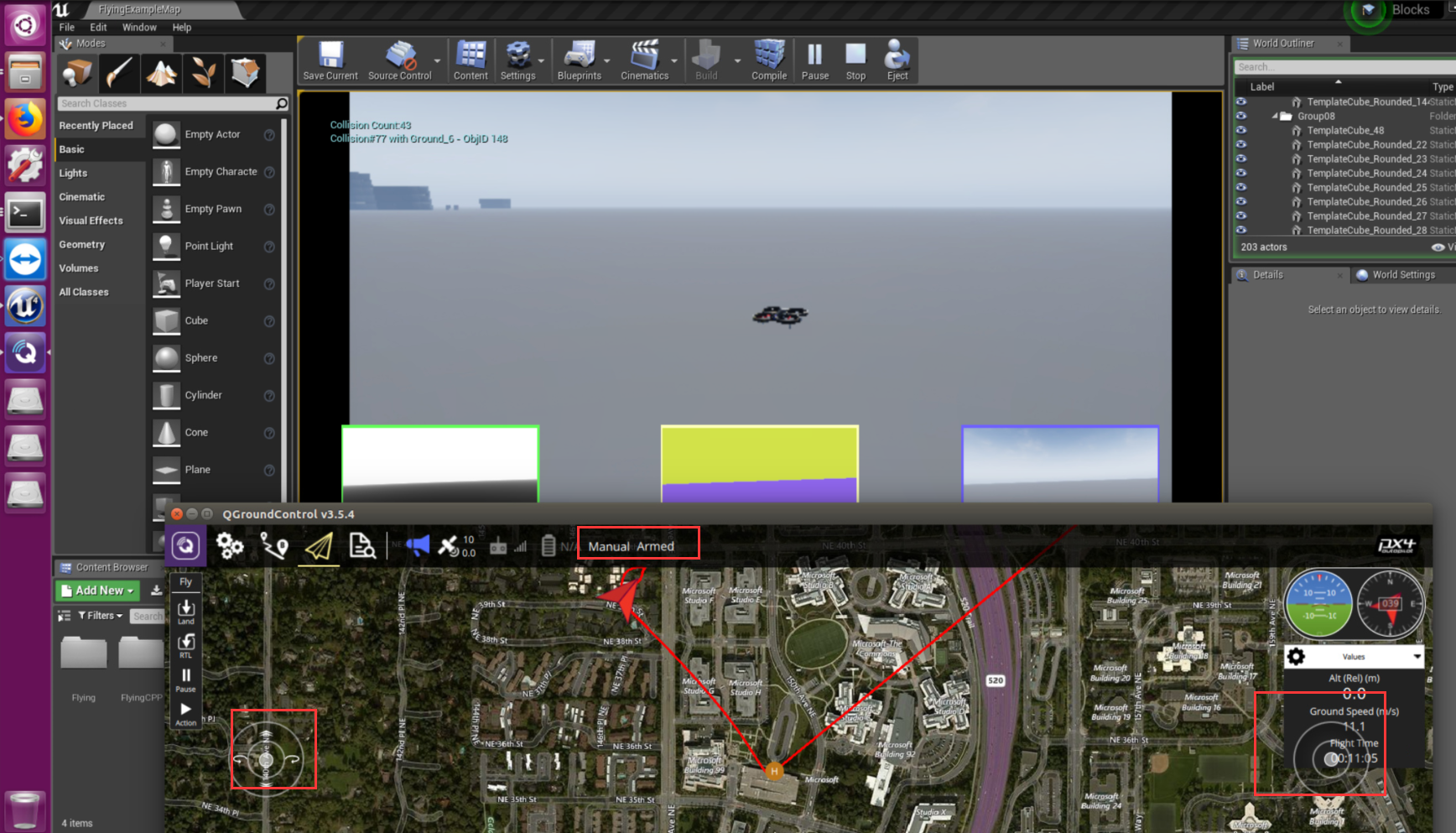
在Manual模式下,也能通过虚拟摇杆进行控制
有时候切换模式能正常takeoff降落,有时候又不行,这就是控制方面的问题了
5.6 说明
为什么前面需要先将QGC连接上Pixhawk后,UE4加载Airsim会报错?然后又重新断开QGC的连接,又重启UE4的AIrsim环境就好了?为什么要这样?我也不清楚,也有点迷糊。
不过这样设置了之后,在第二次的时候,就不需要这样操作了,可以直接
(1)打开QGC,确保QGC不是连接状态(如果自动连接上,请手动断开)
(2)打开UE4环境,直接点击Play
但是这时的QGC,好像保留了上次的效果
总结
总之,困扰了许久的Pixhawk在Linux下的HITL配置,终于解决了。虽然目前对其控制方式还不太了解,至少是能通信成功。(步骤说的有点啰嗦了~)
下一步,尝试一下用mavros控制是否可行