前言
本篇博客,将对前面的Airsim仿真平台开发过程中遇到过的一系列问题进行记录,并尽可能的记录其中的解决方法。
问题一:安装过程中的问题
1.1 Windows下ROS的安装(已解决)
在机器人控制这一方面,不可避免的会想通过ros对机器人进行控制,而ros在ubuntu下的安装非常方便,在WIndows上安装不如Linux下方便;至少,在接触Airsim之前,我没有在Windows下安装过ros。
第一次在Windows上装ros的时候,还真没有安装成功,在安装一些安装包时,并没有按照其默认路径进行安装,然后也由于刚开始不熟的原因,没有安装成功。因此,后来专门记录写了一篇博客,来记录ros在windows上的安装,其安装过程见Windows下ROS安装配置。
注:如果要使用ros控制,则还是在Ubuntu下控制比较好。我后来记录了Airsim在Ubuntu下的安装笔记。1.2 Ubuntu终端科学上网(已解决)
Airsim仿真平台开发,与Ubuntu科学上网有什么关系呢?
有关系,并且是很大的关系,因为Airsim就是微软开发的,其资源很多都是国外的,国内很难下载到。
如果你的Airsim只是在Windows上进行开发,可能更方便,因为Windows下科学上网更简单,但是在下载资源这方面可能还是不如Ubuntu,因为Windows上更多的是网页端下载,在网页端下载一些国外的资源时,有时会很慢,很难下载~
因此,在Ubuntu下进行开发时,保证终端科学上网是一个很重要的前提。这个也是为了后面的Airsim在Ubuntu上的安装做准备。
其安装过程见Ubuntu终端科学上网。
1.3 Ubuntu下GPU Tensorflow安装(已解决)
在用Airsim做人工智能(深度学习、强化学习)的算法验证这一方面,大部分是用Tensorflow库来验证,当然也有其他的一些,如Keras、pytorch等。但是这些方面这里不考虑,主要以Tensorflow为主。
Ubuntu下安装GPU的Tensorflow时,很容易碰到的一个问题,就是登陆界面重复登陆,这个可能是安装了不合适的版本导致的。因此,我记录了一个稍微比较详细一些的安装文档。
其安装过程见Ubuntu16下GPU-Tensorflow安装步骤
1.4 Ubuntu下,ros相关报错(已解决)
不确定是卸载了一些ros的相关依赖还是什么其他的误操作,在终端执行sudo apt-get update时,提示Hash Sum Minbatch错误。
在网上查找过其解决方法,如:换源、终端翻墙update、换网络、删除/var/list文件都未能解决,最后通过重装系统解决的。虽然重装系统能解决该问题,但并不是一个好方法~
问题二:开发过程中的问题
2.1 自定义ros后,python线程锁的问题(已解决)
自定义了ros,并且同时进行sub和pub时,容易出现python线程锁的问题,具体错误信息如下图:
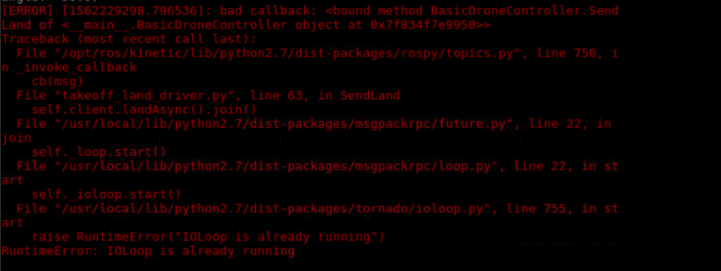
解决方法:添加python线程锁,参考
2.2 Airsim中无人机的控制问题(已解决)
默认的,无人机的控制坐标系是NED坐标系,即+x永远朝着正北方飞行,也就是绝对方向控制~
但是,我们在正常的控制无人机时,采用的坐标系是BODY坐标系,即+x永远朝着机头方向飞行,也就是相对控制~
因此,在真正控制时,需要做一个转换,我这里暂时只考虑了东南西北四个方向。
解决方法:每次控制时,首先获取无人机的当前角度angle,然后根据angle的角度,确定当前机头朝向~
即下图所示,这样就完成了+x永远朝着机头方向前行
| 机头朝向 | x轴 | y轴 |
|---|---|---|
| North | x = x | y = y |
| West | x = y | y = -x |
| South | x = -x | y = -y |
| y = -x |
2.3 Airsim中使用期望速度进行控制的问题(已解决)
2.2节说明了Airism中的无人机相对控制的问题(一般给定固定速度),而本节则要说明的是:初始时,设置一个期望速度值,当给定轨迹点时,根据当前距离与目标轨迹点之间的差值,进行速度求解并且归一化,在这其中就会涉及到坐标系转换的一些问题~
举例(暂不考虑Z轴):无人机起始点(0,0),轨迹点1(10,0),轨迹点2(10,-20),期望速度:2m/s,时间t:1s
- 起始点->轨迹点1:dx = 10 -0 =10,vx = dx / t = 10 / 1 = 10m/s,归一化 vx‘ 约等于2m/s,按照2.2的控制方式,此时 vx’ = vx’, vy’ = vy’,此时机头朝北
- 转向:到达轨迹点1后,左转,左转完成后,此时机头朝西
- 轨迹点1->轨迹点2:dy = -20 - 0 = 20,vy = dy / t = -20m/s,归一化vy’ 约等于2m/s,按照2.2的控制方式,此时 vx’ = vy’,vy’ = vx’(机头朝西),此时,无人机会朝着South方向运动,并不是West方向。
这样就会存在问题,在轨迹点1到轨迹点2的过程中,我按照了2.2的控制方式,但是无人机却并不是朝着我想要的West方向前行,因此,需要采用坐标系转换的方法来解决该问题:
说明:在获取Airsim中无人机的坐标时,我们获取的都是NED坐标系下的xyz值,而我们所采用的这种期望速度方法,实际上是BODY坐标系下的方法,即每次根据BODY坐标系下的xyz值,来进行差值求解,并且进行归一化~
具体的,可以参见Airsim(六)之多机控制中的代码注释部分。
2.4 自定义ROS间的通信问题(已解决)
其主要问题是,使用ros指令发送消息的时候,需要考虑其中的通信频率问题
ros不同于api控制的地方在于:api控制可以等到该条指令结束后,在执行下一条指令。而ros则会将指令全部寄存在缓存中,也是会执行其发布的每一条命令,但是如果通信频率不一致的话,airsim中的无人机响应其ros指令时可能会出现问题。
目前,测试的是在ros的驱动程序中,设置频率为250HZ,在其控制程序中,设置频率为1HZ,差不多能保证其发送接收一致。
2.5 UDP通信间的大图像传输(未解决)
尝试了在两台电脑间使用UDP来进行控制,但是在获取Airsim的图像时,如果设置的图像分辨率较大,这时,图像大小会超出的默认最大值,会报错~
会出现这种情况的原因是设置的图像分辨率较大,因此可以将分辨率设置为合适的值,这样是不会报错的,并且可以在接收端的一方,重新对图像的大小进行修改,这样也能达到最初想要的效果,但是如何利用UDP进行大数据传输,这个问题仍然没有解决。
在网上有搜过相关代码,其思想一般都是先将大文件进行打包,然后传输前加一个文件头,另一端接收时,对文件头进行解析,然后进行分段接收。但其python代码较少,并且依靠网上的代码,并没有测试成功过~
问题三:相关配置问题
3.1 Pixhawk配置(HITL配置)(已解决)
参考网上的教程,其Pixhawk大多都是在Windows下配置的,Linux的很少,但是基本也都差不多
总之,在配置Pixhawk的过程中,很花费了一些功夫,主要就是其很容易爆No GPS相关的错误,后来,经过尝试,终于解决了该问题。
其配置过程见Pixhawk配置(Ubuntu16下HITL配置)
问题四:各种未解决的问题
4.1 Airsim图像,转化成ros的topic之后,和原图有些区别?(未解决)
通过API,获取Airsim中的无人机图像,并将其转化为ros后,和原图有些区别,但是不是很大
这里暂时找不到原先的记录了,总之,这个地方是存在问题的~
4.2 自定义ROS,强化学习训练不好?(未解决)
同样的逻辑,在用api进行强化学习训练测试时,经过30小时左右的训练,大概能训练好,但是添加了自定义的ros,却不行?
暂时也不清楚,是为什么训练不好效果,可能与获取的深度图像不一致有关系,可能与无法用ros进行pause和unpause函数控制有关,可能通信频率设置的不太对。
总之,在github上面很少找到用ros来进行强化学习训练的,或者这种方法就根本不好,也是存在问题~
4.3 SITL模式下与.sh文件不兼容(未解决)
若在Airsim中使用SITL模式,则只能用UE4提供的环境,如创建的Rolling环境,这时与封装好的sh文件时不兼容的,即启动会报错,无法打开界面~
之所以没有解决,是因为可能是需要下载对应的sh的uproject文件,而这个文件环境是需要在UE4的商店中进行购买的,没有购买,因此这方面也存在问题,也就没有测试过~
4.4 SITL模式与Lidar传感器不兼容(未解决)
在json中,设置为了SITL模式,并添加Lidar传感器,结果界面可以出来,但是传感器出不来,不知道其原因
总结
由于主要是在对Airsim仿真平台进行开发研究,更多的是环境相关的配置问题,因此,其中的问题,也算不上什么难点,主要还是对Airsim不太熟悉,后面熟悉后就好了。
更多的记录的是开发过程中遇到的一些主要问题等
其中,很多问题不是特别好用文字或图片的形式说明,当中,某些记录可能也不太清楚了,如果有问题,可以和我联系,我的邮箱是: ldgcug@qq.com