前言
在上一篇博客中,主要介绍了实验的一些操作方法,本篇博客将介绍具体的实验流程
本文的所有实验的地面纹理都已修改为瓷砖背景
一、实验一
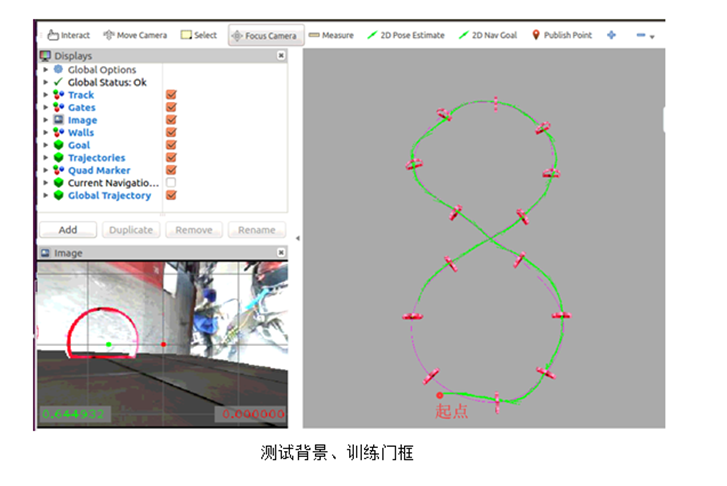
室内背景,且门框形状固定,门框纹理固定,收集训练数据
(1)将背景修改为真实场景下的训练背景
(2)设置无人机飞行时间,将门框形状和门框纹理进行固定
因为是在服务器上运行,服务器上的机器性能不够,测试发现,飞行40s,只能穿越前6个框,进行算法验证测试
不同的电脑飞行40s,穿越的框应该是不一样的,要根据机器性能实际考虑飞行时间
collect_data.py,collect_data_in_fixed_env函数,设置飞行时间
1 | def collect_data_in_fixed_env(num_iterations): |
collect_data.py,mian函数,固定门框纹理、门框形状
1 | def main(): |
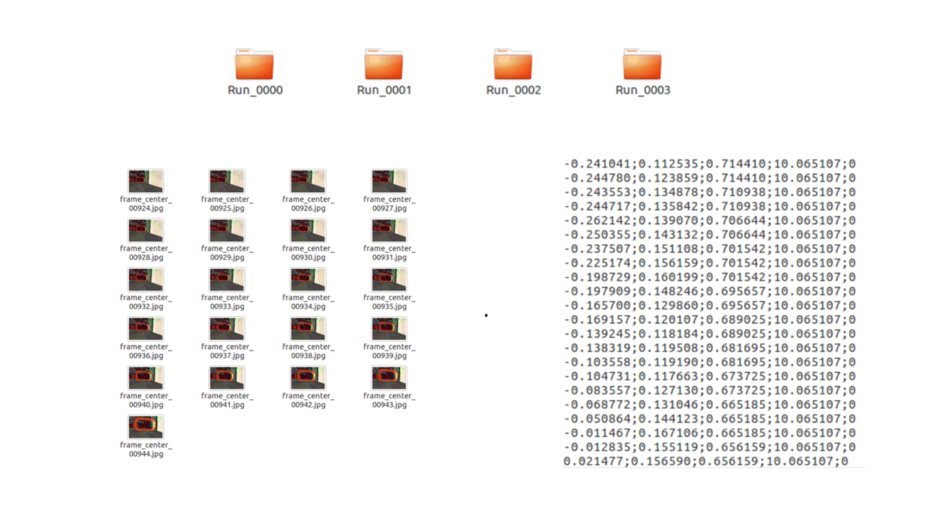
(3)运行py程序,收集数据
在相应目录下,执行如下命令
1 | python collect_data.py |
(4)修改模型保存位置,设定迭代次数
根据自己的需要,设定相应的值
train_model.sh,第一次只有4组图片数据,根据机器性能,设置个不用太久就能出结果的次数,默认为100
1 |
|
(5)训练神经网络模型
在相应目录下,执行如下命令
1 | ./train_model.sh |
(6)设置测试时的飞行背景图
使用训练背景作为测试背景进行测试,因为目前只是属于算法验证,所以不采用未知背景进行测试
从训练背景图中,随机选择一张图拷贝到test_bkgs文件夹中,并且最好重新命名,命名后的图片在该文件夹中最好属于第一张图片,若test_bkgs文件中有多张图片,则每张图片都会作为测试背景进行测试的。
test_bkgs的完整目录为:sim2real_drone_racing/drone_racing/drone_racing/resources/race_track/iros_materials/materials/textures/test_bkgs
(7)设置最后一个checkpoint,作为测试时的网络模型(详情可见上一篇博客的2.7.2节)
(8)飞行测试
首先,启动net_controller的launch文件
1 | roslaunch deep_drone_racing_learning net_controller_launch.launch |
然后,启动test_launch的launch文件
1 | roslaunch test_racing test_racing.launch |
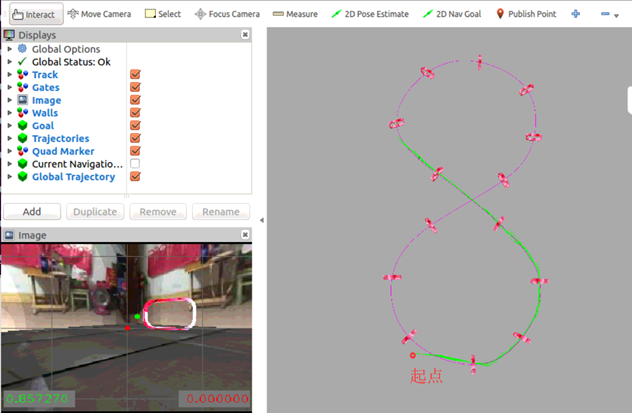
(9)结果显示
在RVIZ界面中,可以看到AI飞手能按照全局轨迹飞行,并且能完美穿越前6个框
二、实验二
室内背景,门框形状和门框纹理不固定,收集训练数据
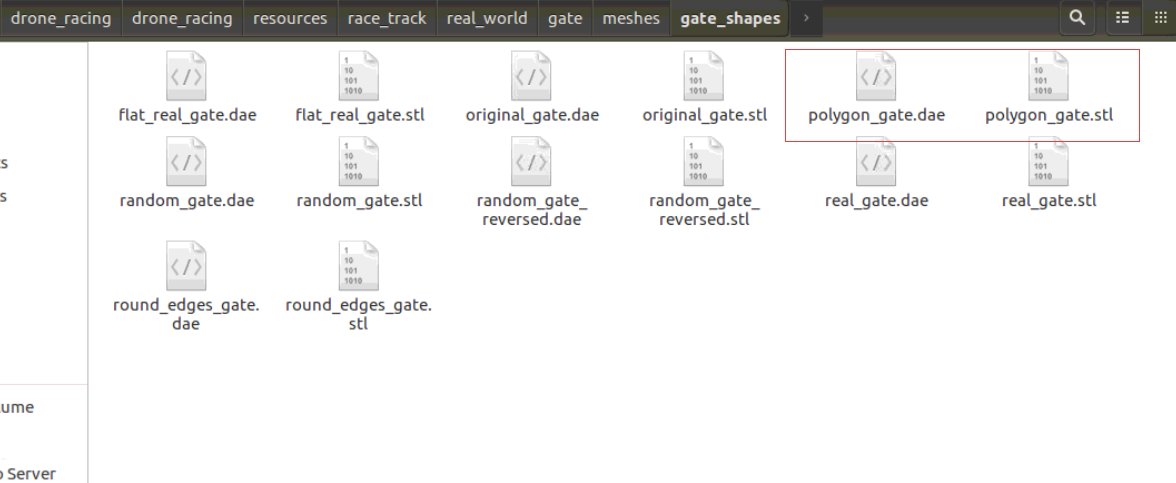
原代码中设置了6种门框形状和10种门框纹理,也可以自己重新定义门框形状和纹理
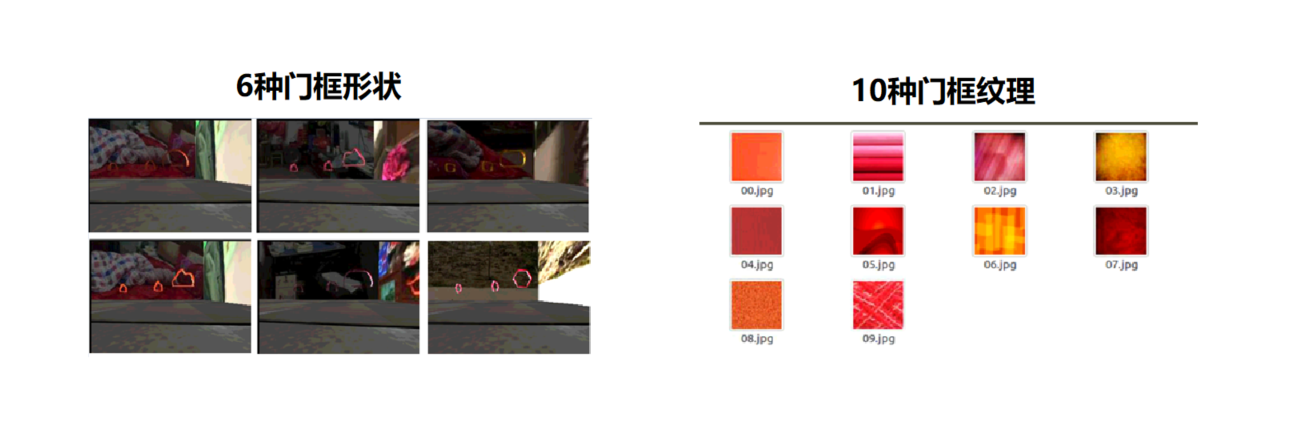
门框形状:在gate_shapes文件夹下,每个门框形状主要由dae文件和stl文件组成
gate_shapes完整目录为:sim2real_drone_racing/drone_racing/drone_racing/resources/race_track/real_world/gate/meshes/gate_shapes
门框纹理:在gate_bkgs文件夹下,其完整目录为:sim2real_drone_racing/drone_racing/drone_racing/resources/race_track/iros_materials/materials/textures/gate_bkgs
(1)将背景修改为真实场景下的训练背景
(2)设置无人机飞行时间,随机选择门框形状和门框纹理
经测试发现,飞行100s左右,无人机能完成一圈的飞行任务,根据机器性能考虑时间
collect_data.py,collect_data_in_fixed_env函数中设置
1 | time.sleep(100)#100s时间刚好飞完一圈 |
collect_data.py,mian函数,随机门框纹理和形状,并设置每张背景图保存的组数
1 | def main(): |
在实际收集过程中,15*4=60组数据中,会有相当一部分数据是失败的,因此最好将num_loops的数值设大一点,这样即使某些数据失败,由于数据量较多,可以将后面的正确数据替换掉失败数据。总之,保证60组数据都是成功且正确的数据即可,并且保证每张背景图都有15组数据,这个要注意。
(3)运行py程序,收集数据
总共收集了60组数据,每张背景,15组数据,其门框形状随机选择,纹理(只用到了前4个纹理),由i确定的
1 | python collect_data.py |
(4)修改模型保存位置,设定迭代次数
(5)接着实验一的模型继续进行训练,参照上一篇博客的2.7.1节
(6)训练神经网络模型
1 | ./train_model.sh |
(7)设置测试时的飞行背景图
可以进行4种测试:
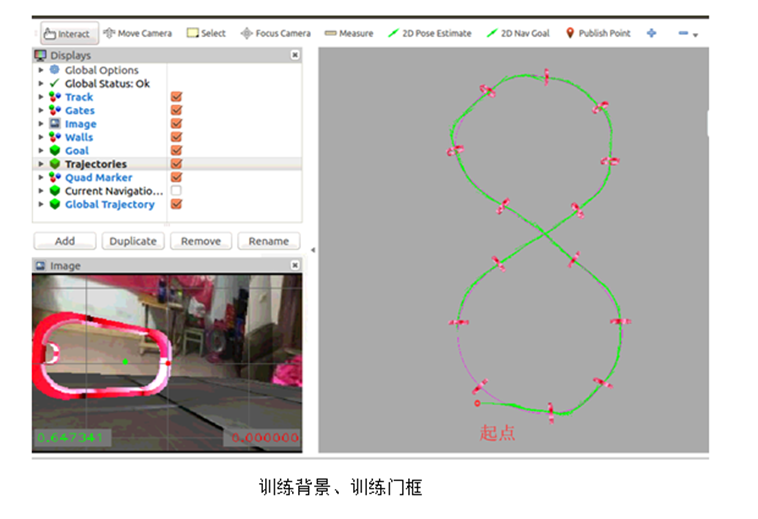
- 训练背景、训练门框
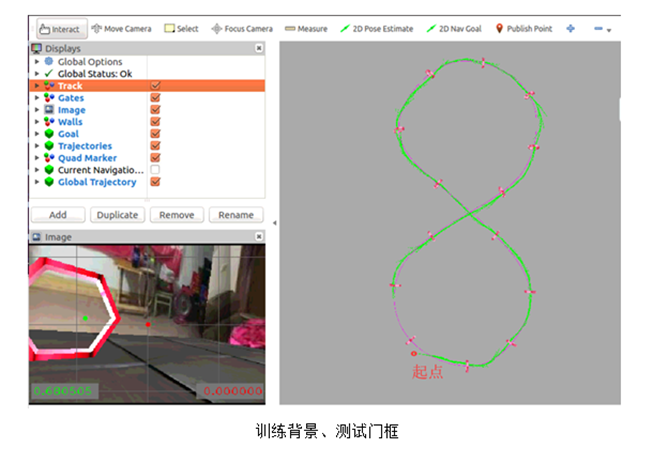
- 训练背景、测试门框
- 测试背景、训练门框
- 测试背景、测试门框
训练背景、训练门框
将训练背景(4张)中的任意一张拷贝到test_bkgs文件夹中
训练背景、测试门框
将训练背景(4张)中的任意一张拷贝到test_bkgs文件夹中,同时,要修改相关文件,使用测试门框进行测试
在启动test.launch文件后,实际是通过读取meshs文件中的dae文件和stl文件,来决定使用哪一个门框形状,其完整目录为
sim2real_drone_racing/drone_racing/drone_racing/resources/race_track/real_world/gate/meshes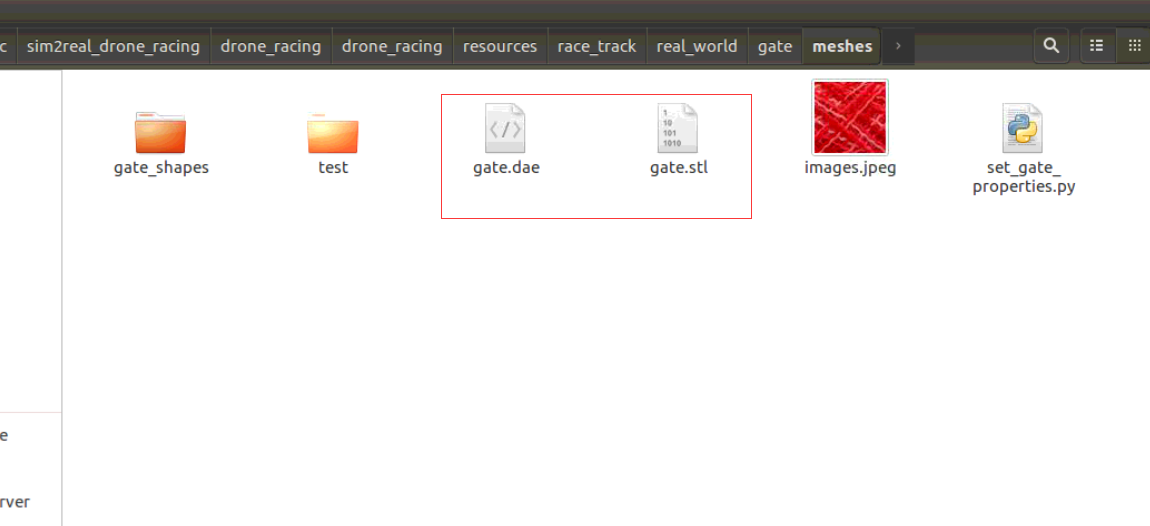
因此,想要使用六边形门框(测试门框)作为测试时的门框形状,需要将gate_shapes文件夹下的polygon_gate.dae和polygon_gate.stl文件拷贝到meshs文件夹下,并将其重新命名为gate.dae和gate.stl文件,原先的文件可以删除。
测试背景、训练门框
将新的未知背景拷贝到test_bkgs文件夹中,并且重新命名,命名后的排序应该排在首位
同样的,重新从gate_shapes文件中拷贝其他的dae和stl文件至meshs文件夹下,并重新命名
测试背景、测试门框
将新的未知背景拷贝到test_bkgs文件夹中,并且重新命名,命名后的排序应该排在首位
同样的,重新从gate_shapes文件中拷贝polygon_gate的dae和stl文件至meshs文件夹下,并重新命名
(8)设置训练中的最后一个checkpoint,作为测试时的网络模型(详情可见上一篇博客的2.7.2节)
(9)飞行测试
首先,启动net_controller的launch文件
1 | roslaunch deep_drone_racing_learning net_controller_launch.launch |
然后,启动test_launch的launch文件
1 | roslaunch test_racing test_racing.launch |
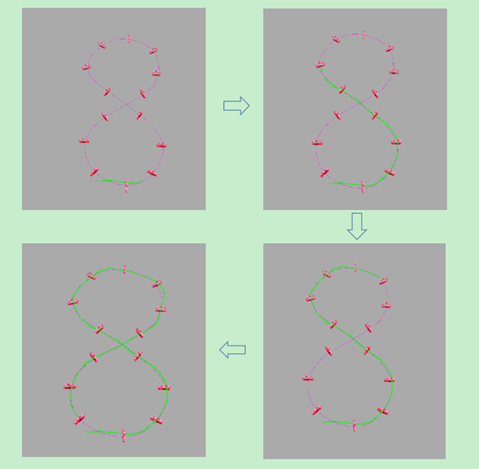
(10)结果显示
在RVIZ界面中,可以看到AI飞手能按照全局轨迹飞行,并且能完美穿越一圈
因为测试背景,测试门框的效果不好,也就没有在这里显示
其定量分析如下:
| 训练背景、训练门框 | 测试背景、训练门框 | 训练背景、测试门框 | 测试背景、测试门框 | |
|---|---|---|---|---|
| 成功率 | 100% | 100% | 80% | 0% |
| Passed Gates | 30 + 30+30+30+30 | 30+30 +30 +30+ 30 | 8+30 + 30 + 30+ 30 | 7+11+11+3+11 |
三、实验三
室内背景,门框形状和纹理不固定,收集多组静态数据组成动态数据
实验二提升了神经网络的鲁棒性,增加了门框形状和纹理的种类
实验三主要是为了实现动态(移动门框)情境下的穿越任务
(1)将背景修改为真实场景下的训练背景
(2)设置无人机飞行时间(100s),随机选择门框形状和门框纹理
(3)运行py程序,收集数据
实验二可以看做是一次静态数据,因此再添加两次静态数据即可。
修改门框的x坐标,整体在初始值上向左平移1m(2.7-1 = 1.7m)
(1)将每个门框的x坐标整体向左平移1m,其他坐标值及朝向不变(参考上一篇博客中的2.6节)
(2)重新生成全局轨迹
(3)运行代码,收集数据
1
python collect_data.py
修改门框的x坐标,整体在初始值上向右平移1m(2.7+1=3.7m)
(1)将每个门框的x坐标整体向右平移1m,其他坐标值及朝向不变(参考上一篇博客中的2.6节)
(2)重新生成全局轨迹
(3)运行代码,收集数据
1
python collect_data.py
(4)修改模型保存位置,设定迭代次数
(5)接着实验二的模型继续进行训练,参照上一篇博客的2.7.1节
(6)训练神经网络模型
1 | ./train_model.sh |
(7)设置测试时的飞行背景图
以训练背景作为测试背景,不考虑新背景下的测试
(8)设置训练中的最后一个checkpoint,作为测试时的网络模型(详情可见上一篇博客的2.7.2节)
(9)修改设置,让门框进行移动(详情可见上一篇博客的2.9节)
门框移动速度设置0.3,振幅设为1.5
(10)飞行测试
首先,启动net_controller的launch文件
1 | roslaunch deep_drone_racing_learning net_controller_launch.launch |
然后,启动test_launch的launch文件
1 | roslaunch test_racing test_racing.launch |
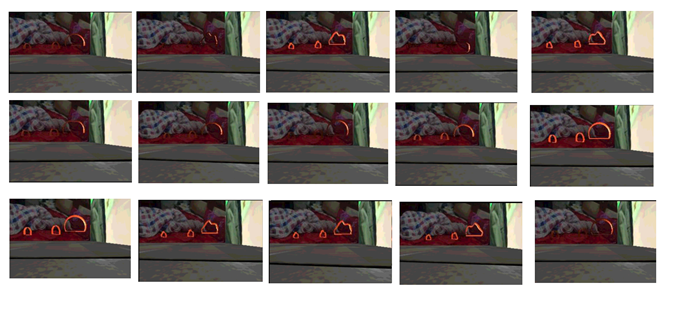
(11)结果显示
定量分析如下:
| 门框移动速度 | gates_dyn_amplitude | 动态场景飞行任务完成情况 | 成功率 |
|---|---|---|---|
| 1.0m/s | 0.1m/s | 14/14 | 100% |
| 1.0m/s | 0.2m/s | 14/14 | 100% |
| 1.0m/s | 0.3m/s | 14/14 | 100% |
| 1.0m/s | 0.4m/s | 1/14 | 0% |
| 0.1m/s | 0.4m/s | 1/14 | 0% |
| 1.5m/s | 0.3m/s | 14/14 | 100% |
| 1.8m/s | 0.3m/s | 14/14 | 80% |
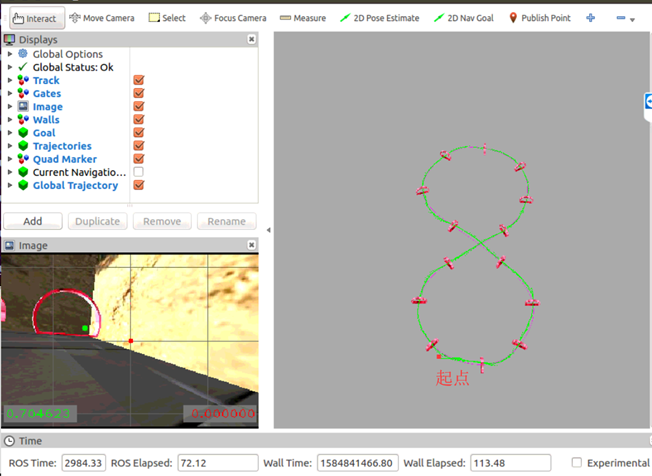
四、实验四
和实验二基本一样,不同的是将室内背景修改为室外背景
结果展示:
五、定量分析
前面都是在定性说明,添加了一些定量分析
| 无人机初始位置 | Passed Gates | 成功率 |
|---|---|---|
| x=0 | 30+30+30+30+30 | 100% |
| x=0.5 | 30+30+30+30+30 | 100% |
| x=1.0 | 30+30+30+30+30 | 100% |
| x=1.5 | 1+1+1+1+1 | 0% |
| x=-0.5 | 30+20+21+30+30 | 100% |
| x=-1.0 | 30+30+30+30+30 | 100% |
| x=-1.5 | 30+30+30+30+30 | 100% |
| x=-2.0 | 30+30+30+30+30 | 100% |
| x=-2.5 | 30+30+30+30+30 | 100% |
| x=-3.0 | 30+30+30+30+30 | 100% |
| x=-3.5 | 30+20+30+30+30 | 100% |
| x=-4.0 | 30+20+30+30+30 | 100% |
| x=-4.5 | 7+30+30+30+30 | 80% |
| x=-5.0 | 30+30+30+7+30 | 80% |
| x=-5.5 | 30+30+7+30+21 | 80% |
| x=-6.0 | 30+30+30+30+30 | 80% |
| x=-6.5 | 1+1+1+1+1 | 0% |
| 无人机初始角度 | Passed Gates | 成功率 |
|---|---|---|
| w=1.0 | 30+30+30+30+30 | 100% |
| w=0.707 | 30+30+30+30+30 | 100% |
| w=1.3 | 1+1+1+2+1 | 0% |
| w=1.2 | 30+30+30+30+30 | 100% |
| w=0.5 | 30+30+30+30+30 | 100% |
| w=0.3 | 30+30+30+30+30 | 100% |
| w=0.1前两个框没有穿过,从第三个框还是,第三次中间飞行漏掉了一个框 | 30+30+30+30+0 | 0% |
总结
所做的实验基本就是这些,做的都是一些比较简单的实验,但由于训练的模型过于多,找不到合适的了,因此也就不再这里添加checkpoint,这篇博客,也只是大概记录下实验流程,如果还要了解的清楚一点的,还是得结合PPT去看。
其相关的checkpoint模型,点击这里,进行下载,其模型不一定准确,因为训练过的模型确实太多,建议将其中的背景图和网络模型进行测试,看看效果,还是重新训练模型较好。
最后,说明一点,如果需要在一台机器上同时进行网络训练和数据收集操作,建议最好重新创建文件夹,在不同的文件夹下进行操作。